Japan’s Humanoid Robots Nearly Ready for Primetime?
Economy Science Technology Society- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
Japan’s robot industry, which has been lackluster of late, is finally starting to get its shine back. One of the pillars of the new growth strategy unveiled by the government in June 2014 is a “robot-driven industrial revolution.” By the end of the year Japan will also formulate a five-year action plan on specific ways to utilize robots. And on the consumer front, in June this year, SoftBank Corp. announced its new humanoid robot, Pepper. Sales of the robot are scheduled to begin next February at the surprisingly low price of ¥198,000.
Japan’s Cutting-Edge Humanoid Robots
 Born in 1974, Shimizu Masaharu has been involved in robot system architecture R&D ever since his days as a graduate student at Aoyama Gakuin University, where he studied robots under the guidance of Professor Tomiyama Ken. After working for the Japan Science and Technology Agency, he joined the Future Robotics Technology Center (fuRo) of the Chiba Institute of Technology in 2003. © Yamada Shinji.
Born in 1974, Shimizu Masaharu has been involved in robot system architecture R&D ever since his days as a graduate student at Aoyama Gakuin University, where he studied robots under the guidance of Professor Tomiyama Ken. After working for the Japan Science and Technology Agency, he joined the Future Robotics Technology Center (fuRo) of the Chiba Institute of Technology in 2003. © Yamada Shinji.
Japan leads the world in research and development of humanoid robots capable of walking on two legs. One key factor that seems to have spurred its advances is the influence of anime, according to Shimizu Masaharu, research director at the Future Robotics Technology Center (fuRo) of the Chiba Institute of Technology. “Quite a few of the researchers involved in developing robots were fans of Astro Boy and Doraemon as kids. In my own case, as someone who earned a PhD in the system architecture of humanoid robots, I was quite influenced by being a member of what might be called the ‘Gundam generation.’”
One major milestone in Japan’s humanoid robot R&D was Honda’s creation of ASIMO. The company began to develop walking robots in 1986. At the time, it was quite rare for a robot to be capable of walking, and a robot walking upright on two legs was seen as an extreme technical challenge. Even before ASIMO debuted in 2000, several prototypes were unveiled in the mid-1990s, sparking a development boom among researchers for two-legged robots.
Since that time, the technology for walking robots has come a long way, as Shimizu explains: “At first, just getting a robot to walk was a technical feat. But now we’ve gotten to the point where robots are running. So a lot of progress has been made. But I should add that these advances are still at the experimental or demonstrational level. We have not yet arrived at the technical level necessary for humanoid robots to become useful ‘tools’ in our life that are capable of providing worthwhile services in real-life situations.”
Humanoid Robots Open Up New Possibilities
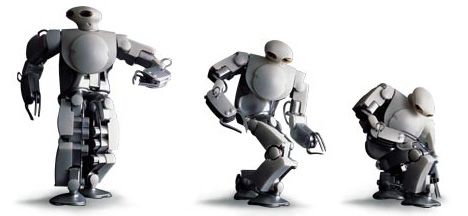 The Morph3 robot was jointly developed by the Kitano Symbiotic Systems project, funded by the Erato program of the Japan Science and Technology Agency, and the industrial designer Yamanaka Shunji. The Morph3 R&D team shifted its base to fuRo on June 1, 2003, and their work has continued to the present day. © fuRo.
The Morph3 robot was jointly developed by the Kitano Symbiotic Systems project, funded by the Erato program of the Japan Science and Technology Agency, and the industrial designer Yamanaka Shunji. The Morph3 R&D team shifted its base to fuRo on June 1, 2003, and their work has continued to the present day. © fuRo.
Shimizu and his fellow researchers at fuRo are developing the Morph3, a humanoid robot designed to be what they call a “metal athlete.” The term refers to the wide range of movement this compact robot is capable of thanks to the flexibility of its joints.
The technologies used to develop this sort of robot capable of high-performance movements may have other applications in the future, such as the development of humanoid interface devices for use in remote communication.
“It might be possible for example,” Shimizu explains, “for two people in locations remote from each other to shake hands via the humanoid robots each is holding, and for the strength of the handshake to be felt on each side. It’s already possible to send audio-visual content over the Internet with a smartphone or computer, but to convey tactile sensations or the perception of force, we need robot technology.”
Currently fuRo is developing Core, a walking robot capable of carrying a person or payload of up to 100 kilograms, more than any other two-legged robot. According to Shimizu, fundamental R&D is being carried out at fuRo with the ambitious goal in mind of creating a robot able to carry a disabled or elderly person up a mountain to enjoy an alpine experience.
“The utility of humanoid robot R&D is often compared to the technical role played by Formula One cars,” Shimizu notes. “The technologies in ordinary cars often develop out of those high-performance machines. The specs of a Formula One car can’t be directly applied to the cars we normally drive, but elements of the cutting-edge technologies created through that R&D do end up having general applications.”
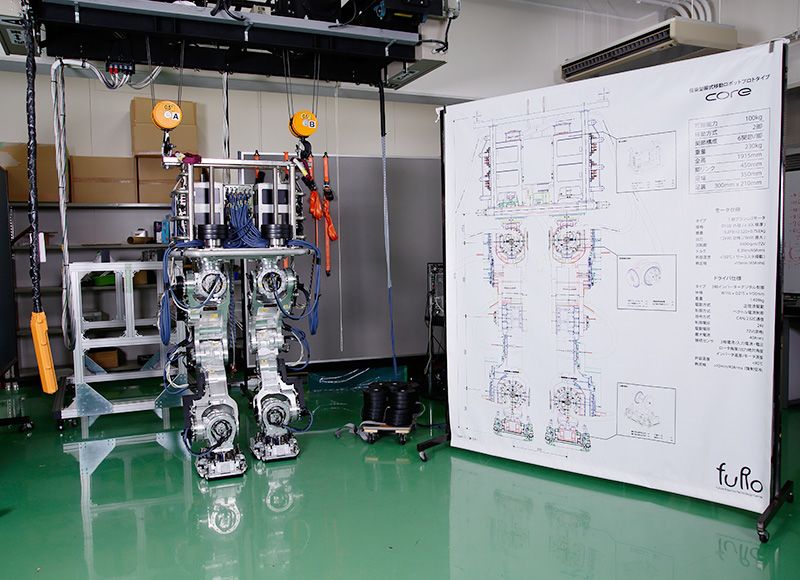 The two-legged Core robot, capable of moving while carrying a person or payload weighing up to 100 kg. © Yamada Shinji.
The two-legged Core robot, capable of moving while carrying a person or payload weighing up to 100 kg. © Yamada Shinji.
Disaster-Relief Robots
Along with general-purpose humanoid robots, there are robots specially designed to respond to disasters. And there is a much stronger recognition of the need for such robots after the Fukushima nuclear disaster that occurred in March 2011 following the earthquake and tsunami. The first made-in-Japan robot to be deployed for use in dealing with the disaster at the Fukushima nuclear plant was Quince, a robot developed at the Chiba Institute of Technology, but prior to that US-built PackBot robots were quickly deployed to the area inside the reactor, as Shimizu recalls:
“At the time, we heard criticism from some who wondered why an American robot had been used when Japan was a world leader in robot technology. Some questioned why we hadn’t deployed ASIMO instead. But those sorts of humanoid robots still were only equipped with technologies for the level of demonstrations and entertainment.
“In contrast, PackBot is a ‘crawler’ robot that was developed for use in military reconnaissance, and it can monitor radioactivity. But in terms of being able to move over rubble and enter narrow, steep staircases, it was inferior to the Quince robot we had developed. We began developing Quince after the massive 1995 earthquake in Kobe, based on the concept of a robot that can traverse a rubble-strewn area to conduct search operations. But it wasn’t designed specifically for a nuclear power plant. We spent three months reconfiguring it so it could operate in radioactive environments, and then we deployed it to Fukushima. It was able to take photographs with its cameras inside the reactor building, climbing all the way up to the fifth floor.
“It succeeded in photographing the situation on the fifth floor of the Fukushima Daiichi Unit 2 Reactor. Unfortunately, on its way back down the robot’s wiring got entangled somewhere around the third floor and it became inoperative. After we made changes to avoid this problem, the improved versions of the robot we sent returned from the fifth floor without incident. They continue to be used to monitor the situation inside the reactors.”
The university has also developed robots specially designed to respond to a nuclear disaster. One of the robots is named Sakura No. 1; it is much smaller than Quince and thus able to maneuver in narrower spaces. The other robot, Sakura No. 2, has an optional arm that can be extended as far out as two meters, with a camera attached on the end. This allows it to make observations in hard-to-reach high areas or in narrow spaces without having to enter them.
Japanese Robot Wins Robotics Challenge
While Japan has been making progress in refining robots to respond to nuclear disasters, based on the needs that came into clear focus after the March 2011 disaster, the United States has been focusing on R&D to make its multipurpose humanoid robots more effective in disaster-relief efforts. Near the end of 2013, the Defense Advanced Research Projects Agency in the United States hosted the DRC, or DARPA Robotics Challenge competition. The goal was to promote the development of robots capable of reacting to a crisis arising from a manmade disaster, such as a nuclear accident. The robots entered in the competition must perform eight different tasks, including the operation of a motor vehicle. In other words, the competition assumes that these robots will have near-human capabilities.
Shimizu traveled to the United States to observe the competition and shared his impressions: “The winner at DRC was a robot developed by Schaft Inc., a venture firm launched at the University of Tokyo. Although the robot has two arms and two legs, unlike a human being, there is no distinction between its front and back. This shape allows it to flexibly carry out operations at a disaster site. But during the competition the robot struggled with the task of walking on rubble, which took it much longer than the existing crawler-type robots needed.”
“Looking at the results in general, with the exception of the ATLAS humanoid robot that was on loan from DARPA, most of the top performing teams were designers of robots that were not modeled after human beings, such as an ape-like robot capable of walking on all fours or rolling on crawlers attached to its limbs. The competition clarified how much improvement is needed in various aspects for the humanoid robots. At the same time, though, the performance of the Schaft robot gave me the sense that Japan’s humanoid technologies are quite advanced. I should mention that the company was bought out by Google in November 2013.”
 The robot designed by Schaft Inc. is able to operate a motor vehicle. © DARPA.
The robot designed by Schaft Inc. is able to operate a motor vehicle. © DARPA.
Benefits of Joint US-Japan Development
Japan and the United States have reached an agreement on a joint R&D and verification project for disaster-relief robots. This agreement is also intended to encourage Japanese initiatives to develop robots for DRC competition. “The Americans are aware of the high level of Japan’s humanoid technologies,” notes Shimizu, “and they’re keen to incorporate those technologies.”
The merit from the American perspective of acquiring those technologies is clear, but there are also benefits to Japan from this collaboration, as Shimizu explains: “There’s considerable value in the DRC competition, which effectively lets us borrow the test course it is based on. It allows us to carry out demonstrations of a variety of tasks on a large scale and provides a way to conduct benchmark tests. This can act as a springboard for accelerating the pace of robot development.”
Work is underway to prepare for the next competition. “In response to an appeal from Japan’s Ministry of Economy, Trade, and Industry, the University of Tokyo, Osaka University, Kobe University, and the Chiba Institute of Technology have set up a joint project team to develop a two-armed, two-legged humanoid robot to compete at DRC in June 2015. I think that some of the disaster-relief know-how we’ve acquired through the development of Sakura No. 1 and No. 2 will be quite useful toward that effort.”
US Companies’ Robot Buying Spree
Over the past few years, one new robot venture after another has been bought out by other companies, most notably Google. This reflects the acceleration of investment in robot technology among the American IT giants and influential venture capital funds. Indeed, Shimizu says that the United States is undergoing a sort of “robot boom” at the moment.
“This seems to be driven by the idea among US companies that robotic technology is on the verge of blossoming. Meanwhile, in Japan, up to now we’ve seen considerable upfront investment by the private and public sector for government projects and other initiatives. But despite Japan taking the lead in this area, all this investment has yet to lead to the practical application and commercialization of robots. This makes investors hesitate about continuing to focus aggressively on the sector.”
Japan has also been slow to perceive the potential of robot technology in areas that are useful to people’s everyday lives. By contrast, in 2002 the US company iRobot launched the automatic Roomba vacuum cleaner, which became a hit product worldwide. Japanese firms like Toshiba and Sharp have only recently begun to develop their own cleaning robots.
 On June 5, 2014, SoftBank Chairman Son Masayoshi (right) and the CEO of its affiliate Aldebaran Robotics, Bruno Maisonnier, unveiled Pepper, a robot capable of reading emotions. © Jiji Press.
On June 5, 2014, SoftBank Chairman Son Masayoshi (right) and the CEO of its affiliate Aldebaran Robotics, Bruno Maisonnier, unveiled Pepper, a robot capable of reading emotions. © Jiji Press.
But Shimizu also points out that SoftBank’s 2012 acquisition of French company Aldebaran Robotics to develop the robot Pepper has helped to energize the market for household robots and given a major boost to Japan’s robot industry. “It was reassuring to know that among Japanese investors and executives, there was someone able to perceive that robot technology is about to take off.”
Shimizu wants to preserve his own sense of excitement at the creativity of robot development, which offers the possibility of bringing something new into the world and setting it into motion.
“Some people think the service robot industry is sluggish because it’s hard to land a budget for development unless you can combine existing technologies to create useful products that match the needs of consumers, at which point the market springs into action. All that is true, but nothing new will ever emerge from such calculations alone. The optimal approach, I think, is for the researchers themselves to think closely about what is out there in the world that excites them, and then create something that excites other people, too. I remember the excitement I felt when I first entered the field of robot R&D. It seems to me the environment to support that feeling is finally in place.”
(Originally written in Japanese by staff editor Itakura Kimie based on an August 19, 2014, interview with Shimizu Masaharu. Banner photo © Yamada Shinji.)▼Further reading
 Leading the World in Humanoid Robotics Leading the World in Humanoid Robotics Understanding Humans to Improve Robot Technology |  Fukushima’s Radioactivity-Proof Cleanup Robot Fukushima’s Radioactivity-Proof Cleanup RobotMeet Quince, the robot helping to clear up Fukushima Daiichi |  Famous Faces Famous FacesSome Hard-Working Celebrities of the Robot World |
disaster robot nuclear disaster humanoid Chiba Institute of Technology rescue