
Japan’s Robots: Becoming More Human
A Robotic Arm with a Sense of Touch
Science Technology- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
Giving Robots a Sense of Touch
Humans can pick up soft or small objects with ease, but that is not the case for robots, which have difficulty replicating the delicate movements of the human hand. When they do not know how strong a grip is needed, robots can break things or injure humans.
What robots need is a sense of touch. This is the most challenging of the five senses to quantify and to turn into digital signals. A robot with this sense will be able to adjust its grip according to how the object it grasps feels. If we can build such robots, we will be able to put them to work in closer contact with people.
A Robotic Arm That Can Pick Up a Potato Chip
GP-Arm, a general-purpose robotic arm developed by Assistant Professor Nozaki Takahiro and fellow researchers in the field of haptics (touch technology) at Keiō University’s Faculty of Science and Technology, is able to adjust the strength of its grip according to what it grasps. The robotic arm can alternately clasp a lemon and a piece of bread, and even hold a single potato chip without crushing or dropping any of them.
“For a conventional robot, we needed to carefully measure such properties as position, size, and weight and program them into the machine before it was able to grasp a piece of bread,” Nozaki reports. “If the piece of bread looks the same but differs just slightly from the programmed size and other properties, the robot can no longer grasp it accurately. GP-Arm doesn’t require such programming, though, and can make delicate movements that conventional robots find difficult.”

Sensing Force Without Sensors
GP-Arm includes a master controller arm and a slave arm that grasps things and performs other movements. A human operates the three fingers of the master to control the movements of the slave, which conveys the tactile sense of the objects gripped back to the master. For example, if the slave arm is moved to pick up a lemon, the fingers of the master will stop in a position corresponding to the size of the lemon and will not tighten further. Tactile force is communicated through the interaction between the gripping force of the slave arm and the elastic force of the object being gripped. Hence, bidirectional communication between the slave and master arm is essential.
Such communication employs the real haptics technology developed by Professor Ōnishi Kōhei of Keiō University. This world-first technology enables tactile force to be transmitted bidirectionally and remotely. Based on this technology, the force applying to the motor of one arm is quantified with a proprietary algorithm and is transmitted to the other arm. Since GP-Arm does not use force sensors like those in video game consoles and other haptic devices, the risks of a breakdown or interference are low, while cost and size benefits are large.
 A slave arm, left, gripping an object by means of a master controller arm.
A slave arm, left, gripping an object by means of a master controller arm.
Recording and Editing Motion
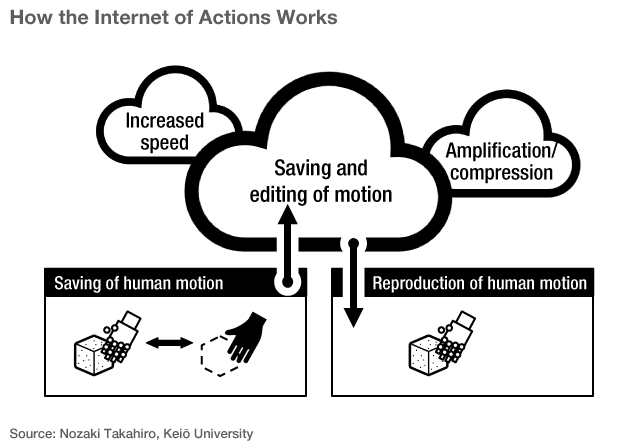
The force the slave arm uses to grip objects is instantly quantified and recorded. This data can be saved to reproduce the recorded motion even when there is no human to operate the master arm. The recorded motion can also be edited to increase its speed or force. Massive objects can thus be moved by multiplying by 10 or 100 times the position and force signals of the human-operated master arm. Conversely, delicate processing or surgery impossible with human hands may be performed by robots by reducing these signals to 1/10th or 1/100th of their original levels. Screws can be loosened by instructing the slave arm to perform the reverse motion of tightening them. The possibilities for editing recorded data are endless.
The measurement and quantification of human movement in haptics is similar to the sensing that forms the basis of the internet of things. The research group, however, states that it is aiming for the development of an even more dynamic “internet of actions” through the saving, editing, and reproduction of motion.
On-the-Spot Judgments and Responses
Another feature of the GP-Arm is its ability to make on-the-spot judgments about the gripping force required. In a demonstration witnessed by the author (see the accompanying video), a five-fingered glove was fitted to the slave arm to grip a piece of bread and a lemon, with a person some distance away manipulating the master arm. The slave arm was able to successively grip bread and a lemon, despite differences in hardness and weight, sensing that these objects were different the moment they were clasped and adjusting the amount of gripping force accordingly.
A recent trend in robot development is cloud robotics, where robot motion is governed by a computer accessed through the Internet. When gripping objects, however, the robot must determine the level of force needed instantly the moment they are gripped. Signals from an Internet-linked computer do not arrive fast enough to make this possible. To get around this problem, GP-Arm uses high-speed fog artificial intelligence where judgments are made instantly by a computer connected directly to the robotic arm. This was enabled by the development of a small circuit board incorporating real haptics technology. The term “fog AI” is derived from the image of fog materializing at the earth’s surface, in contrast to clouds floating high in the sky.
 The One Board Core circuit board held by Assistant Professor Nozaki measures 35 millimeters along each side.
The One Board Core circuit board held by Assistant Professor Nozaki measures 35 millimeters along each side.
A Robot to Work Alongside Humans
The range of applications for GP-Arm is quite broad. A dozen or so companies are pursuing research and development in the areas of automobiles, construction machinery, agriculture, healthcare, nursing care, and aerospace. A number of projects are close to commercialization, and preparations are underway to launch a startup to develop industrial applications.
Robots are envisioned as serving as substitutes for human labor by enabling automation and increased efficiency. Should they become capable of delicate motions, the door will open to people-friendly applications as well. For example, the risk of food poisoning would be greatly reduced by processing foods at temperatures that are too low for human workers. Doctors could perform surgery remotely, and people with disabled hands would find work easier to do. The goal of the GP-Arm project is to develop technologies for applications requiring the human sense of touch. The appearance of “gentle robots” capable of assisting people without injuring them would open up a host of new possibilities.
(Originally written in Japanese by Ushijima Bifue and published on January 31, 2017.)