月面探査国際レース:日本の「HAKUTO」が参戦
Newsfrom Japan
科学 技術・デジタル- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
米グーグル社がスポンサーとなり、民間による世界初の月面探査成功を競う国際賞金レース「グーグル・ルナ・XPRIZE」(GLXP)に、日本のチーム『HAKUTO』が参戦。開発したロボット探査車(ローバー)の性能が評価されて中間段階の「マイルストン賞」を獲得するなど、有力候補の一つとなっている。月に向かうロケット打ち上げは、2016年後半から17年にかけて行われる見通し。ハクトの探査車は米国、チリのチームと同じロケットに搭載され、月面での探査レースを繰り広げる。
自動操縦の探査機で、高解像の動画を地球に
同レースは宇宙産業発展の起爆剤にしようと、米国の非営利組織「XPRIZE(エックスプライズ)財団」が2007年にスタート。2017年末を達成期限に、①民間資金で開発したローバーを月面に着陸させる、②着陸地点から最低500m以上、ローバーを自動操縦して移動する、③月面の模様を撮影した高解像度の動画と静止画を地球に送信する――という3つのミッションを参加チームに課している。
ミッションを達成したチームには優勝賞金2000万ドル(約22億円)が与えられる。2位は500万ドル。このほか総額400万ドルの各種ボーナスが用意されている。
2016年3月の時点で、13カ国の16チームがレースに参加。うち入賞を狙えると目されているのが米国のアストロボティックとムーン・エクスプレス、インドのインダス、ドイツのパートタイム・サイエンティスツ、それにハクトだ。この5チームは2015年1月、技術力判定審査をクリアしたとして「マイルストン賞」(総額600万ドル)を受賞。ハクトはローバーの性能部門で50万ドルを獲得した。
米アストロボティックは月面着陸飛行能力、ローバーの性能、月面からの送信能力の3部門全部で審査をクリア。現段階で、優勝に最も近いチームとみられている。
開発チームに「はやぶさ」の吉田教授
 チームハクトを率いる袴田武史氏=撮影・大谷 清英(nippon.com制作部)
チームハクトを率いる袴田武史氏=撮影・大谷 清英(nippon.com制作部)
「ハクト」(白兎)の名は、“月にはウサギがいる”という日本の伝承に由来する。チームを率いるのは袴田武史氏。映画『スターウォーズ』に夢中になった小学生のころから宇宙への夢を持ち続け、名古屋大学と米ジョージア工科大学大学院で航空宇宙工学を学んだ。
袴田氏は当初、ボランティアとして日本と欧州による混成チームに参加していたが、2013年に欧州側が活動を休止したのを受け、日本単独のハクトを立ち上げた。同年5月にはチームの運営会社アイスペース(東京都港区)を設立し、本格的に活動を始めた。ローバーの開発は、宇宙航空研究開発機構(JAXA)の小惑星探査機「はやぶさ」プロジェクトにも携わった吉田和哉・東北大大学院教授が引き受けた。
ボディーは炭素繊維、ホイールにはウルテム樹脂採用
ハクトが開発したローバーは四輪の「ムーンレイカー」と二輪の「テトリス」の2タイプ。どちらも他チームのローバーと比べてコンパクトだ。日本の得意とする小型化思想を反映させたもので、「マイルストン賞」でもその点が評価された。
袴田氏によると、「資金の関係で今回のレースではムーンレイカー1台を参戦させる。実際に月面に降り立つフライトモデル(FM)ではサイズ感は大きく変わらないが、重さを4キログラムにさらに減らすことを目指している」という。テトリスは次回以降のアイスペースの資源探査ミッションに投入する考えだ。
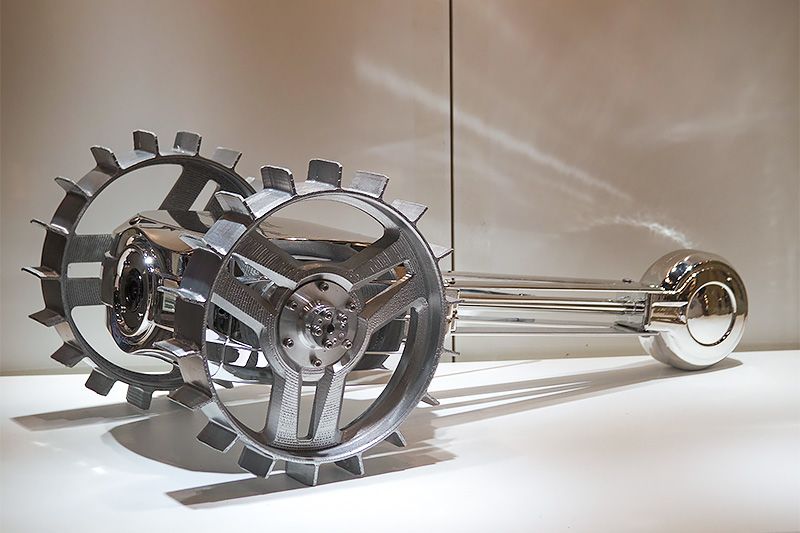
 四輪の探査機「ムーンレイカー」のプリフライトモデルPFM3(重さ7キログラム、長さ60センチ、幅54センチ、高さ48センチ)=撮影・長澤 孝昭
四輪の探査機「ムーンレイカー」のプリフライトモデルPFM3(重さ7キログラム、長さ60センチ、幅54センチ、高さ48センチ)=撮影・長澤 孝昭
 超コンパクト型の二輪探査機「テトリス」のプリフライトモデルPFM3(重さ2キログラム、長さ54センチ、幅27センチ、高さ21センチ)=撮影・長澤 孝昭
超コンパクト型の二輪探査機「テトリス」のプリフライトモデルPFM3(重さ2キログラム、長さ54センチ、幅27センチ、高さ21センチ)=撮影・長澤 孝昭
ムーンレイカーのボディーには炭素繊維強化プラスチック、車輪(ホイール)には耐熱性に優れたウルテム樹脂を採用。ホイールは、レゴリス(パウダー状の細かい砂)で覆われている月面を滑らずに走行できる歯車状のものを開発した。4方向それぞれに小型カメラを搭載したほか、自己位置推定と環境地図を同時に作成できるSLAM技術が組み込まれた。
月の表面温度は、昼は100度以上、夜はマイナス150度以下にもなる。温度差が激しい上に、放射線量も高い。月面は砂地でクレーターや岩石もある。過酷な条件の下、しかもローバー搭載のソーラーパネルで発電する限られた電力でミッションをこなすとなると、技術的な難易度は非常に高い。
ライバルチームの着陸船に“相乗り”で月へ
自前の着陸船を持たないハクトは15年2月、ライバルチームの米アストロボティックと月面輸送契約を締結。ロケットで月に向かう際、アストロボティック・テクノロジー社の月着陸船「グリフィン」に相乗りすることになった。この着陸船にはチリのチームのローバーも同乗。つまり、3つのチームのローバーが同じロケットで地球を出発し、着陸後に横一線で月面探査レースが始まることになる。
着陸船を搭載する米スペースX社の「ファルコン9」ロケットの打ち上げまで、あとわずかに迫った。袴田氏は「ハクトはこれまでローバーの開発のみに注力してきており、3チームによる“ヨーイドン”のほうがわれわれに勝ち目があると思っている」と自信を見せる。課題だったローバー開発・月運搬資金(トータルコストは約10億円)の調達も、「マイルストン賞」を獲得したことで航空宇宙大手のIHI、通信大手のKDDIなどがスポンサーに付き、解決に向け大きく前進した。
この探査が成功したら、ハクトのローバーはどのような映像を地球に送ってくれるのだろうか。夢が膨らむ。
文=長澤 孝昭(nippon.com編集部)
バナー写真:チームハクトのメンバーら。前列中央が吉田和哉・東北大大学院教授(提供:HAKUTO)