
人間の手のように繊細に動くロボットアーム:慶應義塾大学「GP-Arm」
科学 技術- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
ロボットに「触覚」を与えたい
軟らかいものや小さなものをつかむことは、人間ならば小さな子どもでも可能だが、実はロボットには難しい。特に苦手としているのが人の手のような繊細な動き。力加減の分からないロボットに何かを握らせると、物を壊してしまったり、人を傷つけてしまう恐れもある。
ポイントは「触覚」だ。五感の中でデジタル信号化(数値化)するのが最も難しいが、触覚を手に入れれば、人間のように手に触れた物の感覚で力加減を調整することができる。それが実現すると、人と直接触れ合うような仕事も任せられるようになる。
ポテトチップをつまめるロボットアームの誕生
慶大理工学部でハプティクス(触覚技術)を研究する野崎貴裕助教らが開発した汎用ロボットアーム「GP-Arm」(General Purpose Arm)は、従来のロボットにできなかった「対象物に合わせた力加減」や「柔らかな動き」を可能にした。パンをつかんで移動した直後にレモンをつかんだり、1枚の薄いポテトチップを割らずにつまむことができる。
野崎助教は「従来のロボットにパンをつかませようとすると、パンの置いてある位置はもちろん、大きさや重量などを全て細かく計測した上で、プログラミングする必要があります。見た目が同じパンを置かれても、与えられた情報と大きさなどが少しでも違えば、正確につかむことはできません。対してGP-Armはプログラミング不要で、今までのロボットが苦手としてきた繊細な動きが可能です」と自信を見せる。

センサーを使わずに力を感知
GP-Armは、物をつかむなどの動作を行うロボットアーム(スレーブ)と操作用アーム(マスター)から成る。人がマスターの3本指を操作することでスレーブ側のアームが動くと同時に、スレーブがつかんだ物の感触がマスター側に伝わる仕組み。例えば、スレーブを動かしてレモンをつかむと、マスターの指はレモンの大きさと同じ位置で止まり、そこから内側に動かなくなる。力触覚は、つかむ側の力と、それを押し返す物の力の作用・反作用が働いて初めて伝わるものであるため、スレーブとマスターの双方向性が不可欠だ。
両アーム間のやり取りには、同大学の大西公平教授が開発した、力触覚を双方向で遠隔伝送できる世界初の技術「リアルハプティクス」を用いる。一方のアームのモーターにかかる力を独自のアルゴリズム(計算方法)で数値化し、もう一方のアームに伝える。ゲーム機器などで触覚デバイスとして使用されている力センサーは使わないので、故障やノイズのリスクが低く、コストやサイズの面でもメリットが大きい。
 物をつかむ動作を行う「スレーブ」と操作用の「マスター」(右)
物をつかむ動作を行う「スレーブ」と操作用の「マスター」(右)
動作を記録・編集して能力を拡張
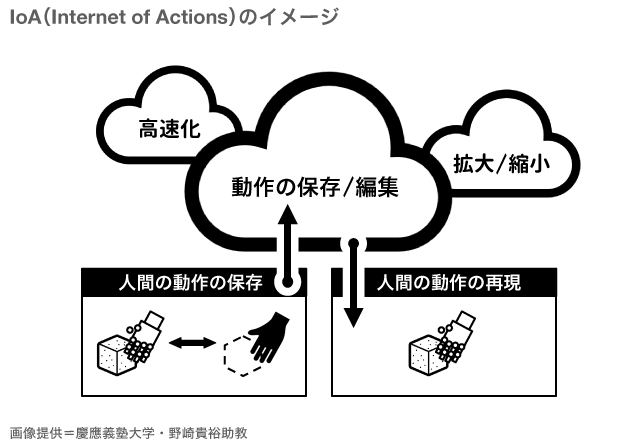
スレーブが物に触れた時の力は、瞬時に数値化して記録。データを保存すると、マスターを操作する人がいない状態でも、動きを繰り返し再現できる。さらに、記録された動作を高速化・高出力化するなど、「編集」することも可能だ。人間は手元でマスターを操作しているだけでも、位置信号・力信号を10倍、100倍にすることで巨大なものを動かすことになる。逆に、これらを10分の1、100分の1にすれば、人間の手では不可能な微細加工や手術をすることもできる。また、ネジを巻く動作を逆に実行するように指示すれば、ネジを緩めることになるなど、アレンジの可能性は無限にある。
人間の動きを計測して数値化するという意味では、IoT(Internet of Things=モノのインターネット)のセンシングに近い。しかし研究グループは、動作の保存・編集・再現を実現することで、より能動的な「IoA」(Internet of Actions=動作のインターネット)への発展を目指しているという。
その場で判断・対応ができる
GP-Armのもう一つの特長は、その場で力加減を判断可能なことにある。取材時のデモンストレーション(動画参照)では、スレーブ側に5本指の義手グローブを装着し、少し離れた場所に立つ人がマスターのアームを動かしてパンやレモンをつかんだが、固さも重さもまるで違うパンとレモンを交互につかむことができるのは、そのものに触った瞬間に違うものであることを知覚して力を調節できるからだ。
近年開発されるロボットのトレンドは「クラウドロボティクス」。ネットでつながった「頭脳」(コンピューター)の判断を受けて動作に移る。だが、物を触ってすぐに力加減を判断するのに、クラウド上の頭脳からの応答を待っていては間に合わない。そこでGP-Armは、「超高速フォグAI」という、アームに直結する頭脳で瞬時に判断する。そのためにリアルハプティクス技術に対応した小型の半導体基板を独自に開発した。このAI(人工知能)の名は、空の上のクラウド(雲)ほどの遠くではなく、地上に発生するフォグ(霧)をイメージしている。
 野崎助教が手に取る半導体基板「ワンボードコア」は35ミリメートル角
野崎助教が手に取る半導体基板「ワンボードコア」は35ミリメートル角
人に寄り添えるロボットに
GP-Armの応用分野は幅広く、自動車、建設機械、農業、医療、介護、航空宇宙など、十数社と共同で研究開発が進められている。中には製品化の一歩手前まで来ているものもあり、産業化を視野に入れたベンチャー企業の設立を準備中だという。
ロボットの役割としては、作業の効率化や自動化など、人間の仕事を代替するイメージが強いが、繊細な動作を手に入れたからこそ、人に優しい使い方が考えられる。例えば、人間には耐えられないほどの極低温下で食品加工の作業をすれば、食中毒などへの感染リスクを大幅に低減できる。また、遠隔操作による手術を行ったり、手に障害を持つ人が仕事しやすいようにするなど、あくまでも人に寄り添う技術を目指すという。人を傷つけず、人を助けることができる、そんな優しいロボットが登場することを期待したい。 取材・文=牛島 美笛動画撮影・編集=大谷 清英(ニッポンドットコム編集部)