
动作细微灵活的机器人手臂:庆应义塾大学的“GP-Arm”
科学 技术- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
给机器人赋予“触觉”
如果是人类,即便是孩童也能抓住柔软或微小的物体,但对于机器人来说,这其实是很难的事情。尤为困难的是像人手做出的那种细微灵活的动作。如果让不会控制握力的机器人拿取某种东西,那就很有可能损坏物品,或者伤害到人类。
关键的一点在于“触觉”,它在五感之中是最难实现电子信号化(数据化)的一种。但是如果机器人手臂拥有了触觉,那就可以像人类那样根据触碰物体的感觉来调节力度。这种功能一旦实现,人类和机器人就可以有更密切的工作接触了。
可以拿起薯片的机器手臂
研究触觉技术的庆应义塾大学理工系助教野崎贵裕等研究人员开发的通用型机器人手臂“GP-Arm”(General Purpose Arm),可以“根据对象物体的不同自动调节力度”并且“动作轻柔”,这是传统机器人做不到的。它可以交替拿起面包和柠檬,也可以完好无损地捏住一块薄薄的薯片。
野崎助教信心十足地表示:“如果让传统机器人去拿面包,那么面包的摆放位置自不用说,大小和重量也必须经过精确计算,然后编制相应的程序。即使放在那里的是外观一样的面包,但如果编程和大小等条件稍有不同,机器人就无法准确地抓住面包。而GP-Arm则无需这样编程,可以做出传统机器人不擅长的微细动作”。

判断力度不需借助传感器
GP-Arm由进行抓握物体等动作的机械手臂(从动装置,slave)和操作手臂(主控装置,master)构成。它依靠人操作主控装置的三根手指,在从动装置一侧的手臂运动起来的同时,从动装置抓握物体的触感传递到主控装置。比如,驱使从动装置抓住柠檬后,主控装置的手指就会在与柠檬大小相同的位置停住,不会再继续向里侧紧捏。由于触觉力是通过抓握力和被抓握物体的反弹力之间的相互作用来传导的,所以从动装置与主控装置的双向互动至关重要。
两个手臂之间的互动,采用了庆应义塾大学教授大西公平在全球首创的触觉力双向远程传导技术“real haptics(真实力触觉)”。这种技术通过独特的运算程序,将一只手臂上电机的受力转化为数据,传输给另一只手臂。它不使用游戏机等设备上用作触觉元件的力量传感器,所以发生故障和干扰的风险很低,在成本和尺寸方面也具有很大优势。
 做抓握动作的“从动装置”和操作用的“主控装置”(右)
做抓握动作的“从动装置”和操作用的“主控装置”(右)
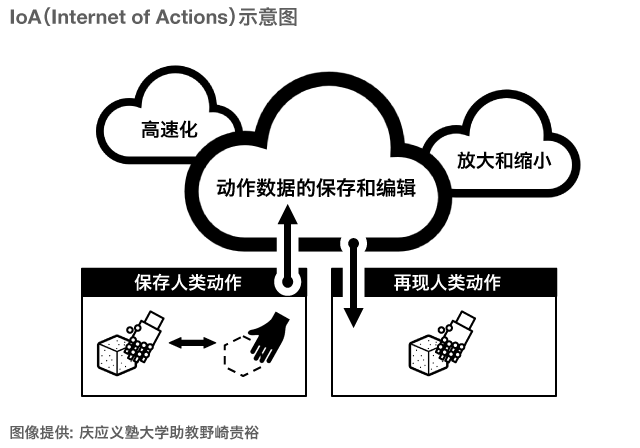
记录和编辑动作,扩展能力
从动装置触碰物体的力量,会在瞬时间转化为数据并被记录下来。保存数据后,在无人操作主控装置的状态下,也可反复再现该动作;而且,对记录下来的动作数据还可以进行“编辑”,比如进行提高速度或力度的处理等。人们只要在操作手边的主控装置,就可以将位置信号、力度信号等放大10倍、100倍,用以移动巨大的物体。相反,如果将信号缩小到十分之一、百分之一,又可以完成人类无法做到的精密加工或手术。此外,如果做出拧紧螺丝的反向动作指令,就可以松动螺丝。总之,在编排被记录下来的动作数据方面有着无限的可能性。
从测量人类动作并转化为数值这个意义而言,这种触觉技术接近于IoT(Internet of Things,物联网)的传感技术。但研究团队称,他们的目标是通过实现动作的保存、编辑和再现,发展成为更具能动性的“IoA”(Internet of Actions,行为互动网)。
即时判断和应对
GP-Arm的另一个特长在于它可以即时判断力度。在采访时的演示(参照视频)中,研究人员给从动装置装上了五个手指的假手手套,站在较远处的人操作主控装置的手臂抓起了面包和柠檬;而之所以能够交替抓起软硬和重量完全不同的面包和柠檬,是因为机器手可以在接触物体的瞬间感应物体的差异,相应地调节抓握力度。
近年来机器人开发的趋势是“云机器人(cloud robotics)”,让机器人的运动通过联网“大脑”(计算机)的控制来进行。但在接触物体的瞬间就要判断力度的话,就没有时间去等待云端大脑的反应。为了解决这个问题,GP-Arm借助直接连在机器人手臂上的名为“超高速Fog AI”的“大脑”即时做出判断。为此,他们独家开发出了一种支持real haptics技术的小型半导体电路板。之所以取名为“Fog AI”,意思是这种AI(人工智能)不像天上的“云”那么遥远,而是像地上的雾(fog)一样近在身边。
 野崎助教拿着的半导体电路板“ONE BOARD CORE”,35毫米见方
野崎助教拿着的半导体电路板“ONE BOARD CORE”,35毫米见方
与人并肩共事的机器人
GP-Arm的应用领域非常广泛,目前的研发工作正在与包括汽车、建筑机械、农业、医疗、看护、航空航天在内的多个领域的十几家企业联手推进。据说其中一些项目距离实现商品化的目标已经只有一步之遥,正在筹备建立着眼于产业化发展的创业公司。
提到机器人的作用,它往往给人工作效率高、自动化、是人力劳动的替代品这样的印象。而它们只有在能够做出灵活精细动作的情况下,才有望实现人性化的用途。比如,如果让它在人类难以忍受的极低温环境下从事食品加工作业,那就可以大大降低因食品加工不善引起食物中毒的风险;还可以通过远程操作实施手术,或者帮助手有残疾的人士工作等等。总之,目的就是开发出与人类关系更加密切的技术,能够给人们以帮助而又不会伤害到他们——我们期待着这种“温柔的机器人”早日面世。 采访、撰文:牛岛美笛视频拍摄、编辑:nippon.com日本网 编辑部 大谷清英