La revolución de los robots despega en Japón
Economía Ciencia Tecnología Sociedad- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
Un rayo de luz ilumina por fin la decaída industria robótica de Japón. Uno de los pilares de la nueva estrategia de crecimiento presentada por el Gobierno el pasado junio consistía en publicar este mismo año un plan quinquenal de medidas concretas para fomentar la aplicación práctica de los robots e impulsar una “revolución industrial a través de la robótica”. El mismo junio de 2014 SoftBank presentó su robot humanoide Pepper, que sacará a la venta en febrero de 2015 por 198.000 yenes, un precio de “ganga” que ha causado conmoción en el sector.
El avance de Japón gracias a los robots humanoides
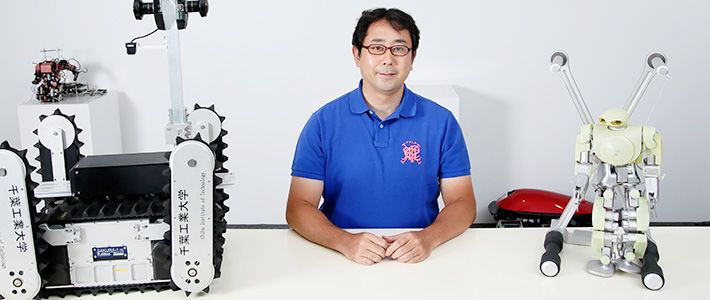
 Shimizu Masaharu nació en 1974. Desde que ingresó en el laboratorio del profesor Tomiyama Ken, investigador en robótica de la Escuela de Posgrado de la Universidad Aoyama Gakuin, ha dedicado toda su carrera a la investigación en arquitectura de sistemas robóticos. Tras trabajar en la Agencia de Ciencia y Tecnología de Japón, en 2003 pasó a formar parte del Centro de Tecnología Robótica del Futuro (fuRo) del Instituto Tecnológico de Chiba. (Fotografía de Yamada Shinji)
Shimizu Masaharu nació en 1974. Desde que ingresó en el laboratorio del profesor Tomiyama Ken, investigador en robótica de la Escuela de Posgrado de la Universidad Aoyama Gakuin, ha dedicado toda su carrera a la investigación en arquitectura de sistemas robóticos. Tras trabajar en la Agencia de Ciencia y Tecnología de Japón, en 2003 pasó a formar parte del Centro de Tecnología Robótica del Futuro (fuRo) del Instituto Tecnológico de Chiba. (Fotografía de Yamada Shinji)
“Japón es, desde hace muchos años, líder mundial en el desarrollo de robots humanoides capaces de andar a dos pies. Creo que el anime ha tenido un papel decisivo en ello, ya que la mayoría de los investigadores del campo de la robótica se han visto influidos por series de anime como Astro Boy y Doraemon”, comenta Shimizu Masaharu, investigador jefe del Centro de Tecnología Robótica del Futuro del Instituto Tecnológico de Chiba (fuRo). “Yo mismo me doctoré en arquitectura de sistemas de robots humanoides y pertenezco a la ‘generación Gundam’, por lo que poco o mucho también recibí la influencia de esa serie”.
El robot ASIMO de Honda fue un hito crucial en la historia del desarrollo de robots humanoides en Japón. Honda empezó a investigar en robótica en 1986, cuando la idea misma de que los robots caminasen era inusual, y se veía increíblemente difícil desarrollar la tecnología que les permitiese desplazarse a dos pies. Aunque ASIMO no salió al mercado hasta el año 2000, la presentación de prototipos como el PS y el P3 en la segunda mitad de los noventa provocó un boom de la investigación de los robots bípedos. ¿Hasta dónde ha avanzado la tecnología de estos robots desde entonces?
“Al principio la tecnología para hacer que los robots caminasen a dos pies presentó dificultades, pero hoy en día se ha avanzado hasta el punto de lograr que incluso corran. Aun así, por ahora esta tecnología se limita a experimentos y demostraciones, y todavía no se ha alcanzado el nivel necesario para aplicarla en entornos reales y obtener resultados útiles desde el punto de vista práctico.”
El futuro de la mano de los robots bípedos
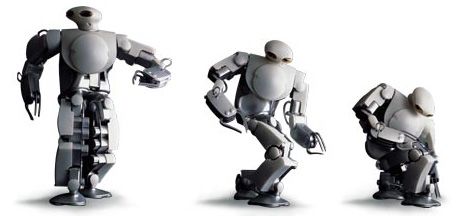 El robot morph3 fue diseñado dentro del Proyecto de Sistemas Simbióticos de ERATO (Exploratory Research for Advanced Technology) con la colaboración del diseñador industrial Yamanaka Shunji. El 1 de junio de 2013 el equipo de desarrollo de morph3 se trasladó al Centro de Tecnología Robótica del Futuro (fuRo) del Instituto Tecnológico de Chiba, donde continúa con las investigaciones del proyecto. ©fuRo
El robot morph3 fue diseñado dentro del Proyecto de Sistemas Simbióticos de ERATO (Exploratory Research for Advanced Technology) con la colaboración del diseñador industrial Yamanaka Shunji. El 1 de junio de 2013 el equipo de desarrollo de morph3 se trasladó al Centro de Tecnología Robótica del Futuro (fuRo) del Instituto Tecnológico de Chiba, donde continúa con las investigaciones del proyecto. ©fuRo
En el Instituto Tecnológico de Chiba, Shimizu ha desarrollado morph3 (vídeo), un robot ligero con una gran flexibilidad articular y una movilidad amplísima diseñado con la idea de un “atleta metálico”. La tecnología que integra este robot de escritorio con sofisticadas funciones físicas podría aplicarse en un futuro para desarrollar dispositivos de interfaz con cuerpo propio en el campo de las telecomunicaciones.
“Para hacernos una idea: dos personas que estén en lugares distintos y tengan un pequeño robot humanoide cada una podrán darse un apretón de manos transmitiendo la fuerza del apretón a través de los robots. La información visual y auditiva puede transmitirse por internet con los teléfonos móviles o los ordenadores, pero para transmitir la información táctil es necesario recurrir a la tecnología robótica.” El robot bípedo core (vídeo) que está desarrollando el Instituto Tecnológico de Chiba es un robot de carga. Capaz de transportar hasta 100 kilogramos de peso, core es uno de los robots bípedos con mayor capacidad de carga del mundo. Según afirma Shimizu, se trata de “un proyecto de investigación básica para crear un vehículo que en el futuro permitirá a las personas de movilidad limitada realizar acciones como subir las escaleras o incluso hacer senderismo”.
“El propósito de la investigación sobre robots humanoides se compara a menudo con la de los vehículos fórmula 1. Los fórmula 1 son una continuación del automóvil común, pero con capacidades muy superiores. Aunque esas capacidades no se apliquen directamente a los automóviles que se usan en la calle, la tecnología punta en que se basan sí puede aprovecharse para mejorarlos.”
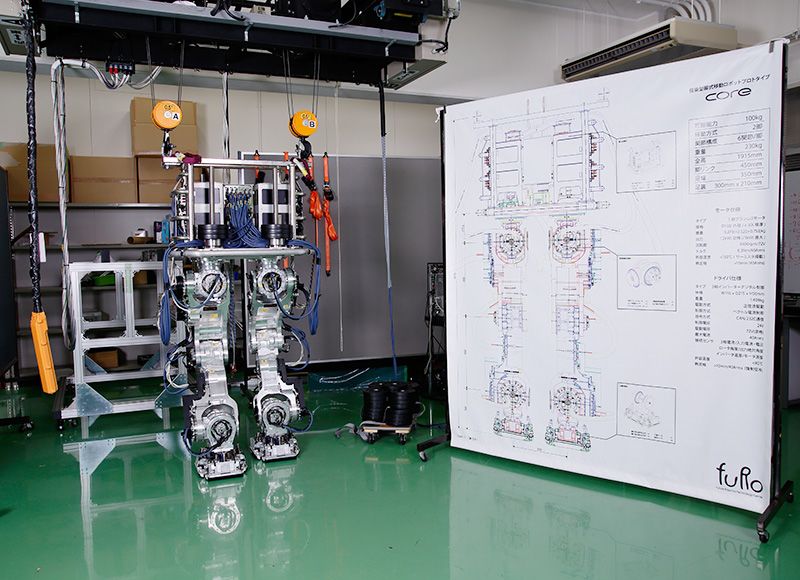 Core, el robot bípedo del futuro capaz de transportar personas o cargas de hasta 100 kilogramos. (Fotografía de Yamada Shinji)
Core, el robot bípedo del futuro capaz de transportar personas o cargas de hasta 100 kilogramos. (Fotografía de Yamada Shinji)
Robots de ayuda en desastres, claves para la gestión de accidentes nucleares
A diferencia de los versátiles robots humanoides, los robots creados para ayudar en desastres presentan funciones muy específicas para cumplir su misión. La importancia de estos robots se hizo especialmente patente tras el accidente nuclear que tuvo lugar en marzo de 2011 en Fukushima como consecuencia del Gran Terremoto del Este de Japón.
El primer robot de fabricación japonesa que se introdujo en la central de Fukushima Dai-ichi fue Quince, desarrollado por el Instituto Tecnológico de Chiba, pero el primero que entró en la sala de reactores fue PackBot, un robot estadounidense.
Shimizu recuerda aquel episodio: “Hubo críticas del estilo de ‘Si se supone que Japón es un país tan avanzado en robótica, ¿cómo es que han introducido un robot estadounidense primero?’, o ‘¿No podrían usar el robot ASIMO?’. Pero lo cierto es que por aquel entonces el nivel técnico de los humanoides solo daba para usarlos en demostraciones y para el entretenimiento.”
“PackBot era un robot tipo oruga diseñado para la vigilancia militar y resistente a la radiación, pero en realidad nuestro Quince tenía mayor capacidad para desplazarse entre escombros o subir escaleras empinadas. Quince se desarrolló para explorar terrenos cubiertos de escombros, teniendo en mente la situación del terremoto de Kobe de 1995. Como no tenía protección antiradiación, tardamos 3 meses en ponerlo a punto para que finalmente pudiese entrar en la central, subir hasta el quinto piso y tomar fotografías de la situación.”
“Por desgracia, después de subir al quinto piso de la central y fotografiar el lugar, la primera unidad de Quince quedó inmovilizada cuando se le enredó un cable en el tercer piso en el camino de vuelta. Después de ese incidente modificamos el diseño para evitar que se repitiese, y las unidades Quince 2 y 3 lograron explorar el quinto piso y regresar sanas y salvas. Actualmente siguen utilizándose en las tareas de exploración de la central.”
Siguiendo la línea de Quince, posteriormente el Instituto Tecnológico de Chiba ha creado Sakura Ichigō y Sakura Nigō, dos robots enteramente diseñados para su aplicación en desastres nucleares. Sakura Ichigō es bastante más pequeño que Quince para poder entrar en espacios más reducidos. Sakura Nigō tiene un brazo desmontable de dos metros para llevar una cámara y tomar fotografías desde arriba, o bien introducirlo en espacios estrechos en que no entra el cuerpo.
Una empresa fundada por la Universidad de Tokio gana una competición de robots de ayuda en desastres
Mientras Japón perfecciona los robots de ayuda en desastres valiéndose de experiencias como la del terremoto de marzo de 2011, Estados Unidos ha empezado a investigar para usar robots humanoides de alta versatilidad a la gestión de desastres. La edición de finales de 2013 de la competición DARPA Robotics Challenge (DRC), que organiza la Agencia de Proyectos de Investigación Avanzados de Defensa (DARPA, por sus siglas en inglés) de EE.UU., tenía como objetivo promover el avance en el desarrollo de robots para actuaciones de emergencia en accidentes nucleares. El contenido de las ocho tareas requeridas a los robots participantes, que incluían la conducción de vehículos, estaba claramente diseñado pensando en robots humanoides. Shimizu tuvo la oportunidad de visitar Estados Unidos para esa edición de la DRC.
“Ganó SCHAFT, una pequeña empresa surgida de la Universidad de Tokio. Su robot tenía dos brazos y dos piernas pero, a diferencia de los humanos, presentaba una estructura reversible —sin parte frontal y posterior fijas— que le otorgaba una gran flexibilidad de actuación en zonas afectadas por desastres. Sin embargo, en la primera tarea de la competición, el desplazamiento por un terreno cubierto de escombros, fue muchísimo más lento que los robots tipo oruga actuales.”
“Si atendemos al resultado en conjunto, exceptuando el equipo que usó el humanoide ATLAS prestado por DARPA, se mostraron superiores los equipos que usaron robots no humanoides, como los robots tipo simio de cuatro patas y los robots tipo oruga. Quedó claro que los robots humanoides todavía requieren muchas mejoras. Aun así, al observar al robot de SCHAFT en movimiento sentí que la tecnología de los robots humanoides en Japón había alcanzado un nivel muy alto. Y, sin embargo, SCHAFT fue adquirida por Google en noviembre de 2013…”
 El robot de SCHAFT conduciendo un vehículo (©DARPA)
El robot de SCHAFT conduciendo un vehículo (©DARPA)
Las ventajas de desarrollar robots en colaboración con Estados Unidos
Japón y Estados Unidos comparten la voluntad de llevar a cabo proyectos conjuntos de investigación, desarrollo y prueba de robots para la ayuda en desastres. En Japón también se promueve el desarrollo de robots para participar en la competición DRC. “Creo que Estados Unidos es consciente de que Japón posee un nivel alto en tecnología de robots humanoides y desea involucrarse intensamente en su desarrollo”, comenta Shimizu.
Para Estados Unidos la ventaja de colaborar con Japón es involucrarse en el desarrollo de su tecnología robótica, pero ¿qué gana Japón con esa colaboración? “La mayor ventaja para Japón es poder llevar a cabo pruebas de referencia en exhibiciones de gran escala que dan un amplio margen de movimiento como la DRC, en la que se dispone de un circuito de carreras entero. Ese tipo de oportunidades catapultan el desarrollo de la robótica.”
“A petición del Ministerio de Economía, Comercio e Industria, estamos desarrollando un robot de dos piernas y dos brazos para participar en la DRC de junio de 2015, en un proyecto en que colaboran el Instituto Tecnológico de Chiba, la Universidad de Tokio, la Universidad de Osaka y la Universidad de Kobe. Creo que podremos explotar el know-how sobre robots de ayuda en desastres que obtuvimos con el desarrollo Sakura Ichigō y Sakura Nigō.”
Las adquisiciones empresariales por parte de Estados Unidos, síntoma del auge del mercado de la robótica
Empezando por Google, que se ha lanzado a absorber pequeñas empresas de robótica —incluida SCHAFT—, en los últimos años las grandes empresas de IT y de capital riesgo estadounidenses están aumentando la inversión en tecnología robótica. En palabras de Shimizu, Estados Unidos está viviendo un “boom de la robótica”.
“Da la impresión de que las empresas privadas estadounidenses creen que, si le dan un empujón más, la tecnología robótica experimentará un auge. En Japón, empezando por los proyectos públicos, el sector público y el privado han venido haciendo un esfuerzo de inversión considerable en esta industria. Sin embargo, el hecho de que la inversión realizada hasta la fecha no se haya reflejado en la aplicación práctica y la comercialización de su tecnología ha frenado una inversión aún mayor.”
Poco a poco vamos descubriendo que la robótica tiene un mercado de aplicación útil en la vida cotidiana. Roomba, el robot aspiradora que la empresa estadounidense iRobot lanzó en 2002, fue un éxito de ventas mundial. También en Japón Toshiba y Sharp han sacado al fin sus propios robots aspiradora.
Según Shimizu, la compra de la francesa Aldebaran Robotics en 2012 y el desarrollo del robot Pepper por parte de Son Masayoshi han supuesto un impulso muy favorable para la industria robótica japonesa y para el mercado de los robots de uso doméstico: “Me parece muy esperanzador que los inversores y empresarios japoneses sientan que estamos ante un punto de inflexión para el auge de la robótica.”
 Son Masayoshi (a la derecha), presidente de SoftBank, y Bruno Maisonnier, director general de la filial Aldebaran Robotics, presentan a Pepper, un robot que incluye funciones para leer los sentimientos. (Fotografía del 5 de junio de 2014; cortesía de Jiji Press.)
Son Masayoshi (a la derecha), presidente de SoftBank, y Bruno Maisonnier, director general de la filial Aldebaran Robotics, presentan a Pepper, un robot que incluye funciones para leer los sentimientos. (Fotografía del 5 de junio de 2014; cortesía de Jiji Press.)
Shimizu cree que es importante recuperar la ilusión por la creatividad en la robótica, que permite que “nazcan nuevos seres que se mueven por sí mismos”.
“El principal motivo por el que la industria de los robots de servicios está estancada es que no se financia ningún proyecto a menos que sea para crear un producto útil con la tecnología actual, que satisfaga las necesidades del consumidor y tenga buena acogida en el mercado. Aunque eso no es ningún error, impide la innovación. Es maravilloso lograr contagiar a la sociedad la ilusión que uno experimenta al innovar. Siento que por fin existe la coyuntura adecuada para revivir esa ilusión que sentía cuando empecé mi carrera en el desarrollo de robots y compartirla con el resto del mundo.”
(Editado por nippon.com a partir de la entrevista realizada el 19 de agosto de 2014. Traducido al español del original en japonés. Fotografía del titular: Yamada Shinji.)
robots Quince Instituto Tecnológico de Chiba desastres rescate Pepper accidentes nucleares