
Los robots japoneses se hacen más humanos
Los robots humanoides de Japón
Ciencia Tecnología Sociedad Vida- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
Nacido en la prefectura de Fukuoka en 1956. Doctor en Ingeniería. Profesor del Departamento de Ingeniería Mecánica Moderna de la Escuela de Ciencia e Ingeniería Creativa de la Universidad de Waseda. Director del Instituto de Robótica Humanoide (HRI, por sus siglas en inglés), de la misma universidad.
ENTREVISTADOR La historia de la investigación en robots humanoides es antigua, ¿verdad?
TAKANISHI El difunto Dr. Katō Ichirō, que fue mi profesor, comenzó el campo de la investigación con robots humanoides, y poco después desarrolló el WABOT-1, el primer robot humanoide del mundo. Además de la investigación con robots humanoides existía un gran flujo industrial en alza, en campos como la tecnología de la computación, o la maquinaria automatizada. En especial tuvo un gran éxito la categoría de robots que se denominaron “robots industriales”, fabricados en Estados Unidos para trabajar en fábricas. Aunque en origen la palabra “robot” hacía referencia a los robots humanoides, ese sentido se fue diluyendo al tiempo que su uso se extendía con el gran éxito de los robots industriales. Como en el mundo existía esa tendencia, el Dr. Katō terminó por usar el adjetivo “humanoide” para referirse a su investigación.
Sin embargo, al principio cuando se hablaba de “robots” se trataba el tema como si fuera ciencia-ficción, y pensaban que estaban construyendo máquinas sin ton ni son, por lo que resultaba difícil conseguir financiación. Se puede observar en las solicitudes para financiación de aquella época: en vez de usar la palabra “robot” escribían “brazo artificial”, o “piernas artificiales”.
El objetivo es una “persona”: el reto de hacer posible lo imposible
ENTREVISTADOR ¿A qué se debe que los investigadores japoneses construyan robots humanoides?
TAKANISHI El principal problema de la investigación de robots humanoides, o quizá su destino, es el hecho de que el objetivo es fabricar una persona. Las personas somos capaces de realizar fantásticos ejercicios físicos: caminar rápidamente o correr, e incluso participar en los Juegos Olímpicos o la Copa Mundial; podemos por otro lado comunicarnos libremente con el idioma, inventar alfabetos y usar las funciones avanzadas de nuestros cerebros. Estos excelentes seres humanos son nuestro objetivo. En la medida en que continuemos tratando de emular a las personas con los robots humanoides tendremos la dolorosa sensación de que ese objetivo nunca podrá ser alcanzado. Por ello yo nunca voy a cejar en mi empeño.
Sin embargo se ha evolucionado. Cuando el Dr. Katō construyó el WABOT-1, un robot humanoide de cuerpo completo, éste tardaba unos 45 segundos en dar un paso con su funcionalidad bípeda. Y se trataba de pasos de 10 cm, además. Sin embargo, ahora existen robots bípedos que pueden correr. El robot KOBIAN, de mi laboratorio, puede caminar a una velocidad casi humana, menos de un segundo por paso, y su longitud de paso máxima es de 40 cm. Creo que se puede decir que los robots ya han conseguido caminar de forma similar a los humanos, flexionando sus rodillas.
Soy de la opinión que, gracias a los avances en computación, ahora contamos con robots de altas prestaciones, que incluyen cosas como la capacidad de analizar imágenes, o de comunicarse con personas.
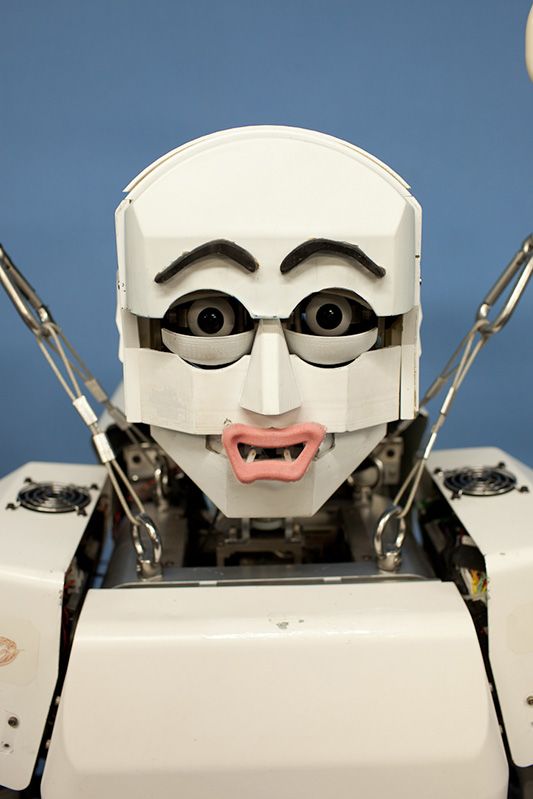
 Robot humanoide bípedo KOBIAN-R. Además de caminar sobre dos piernas, puede representar varias expresiones faciales (ver galería de fotos). En la foto, con cara de sorpresa.
Robot humanoide bípedo KOBIAN-R. Además de caminar sobre dos piernas, puede representar varias expresiones faciales (ver galería de fotos). En la foto, con cara de sorpresa.
 WAS-2RII, robot humanoide que toca el saxofón. Subiendo y bajando el labio superior, puede controlar la presión del aire, y con el labio inferior controla el tono.
WAS-2RII, robot humanoide que toca el saxofón. Subiendo y bajando el labio superior, puede controlar la presión del aire, y con el labio inferior controla el tono.
ENTREVISTADOR ¿Es diferente la investigación sobre los robots en Japón y en Europa, debido a la influencia de elementos sociales como la religión?
TAKANISHI El año pasado fui a Alemania y Holanda para dar unas conferencias, y antes de comenzar me dijeron “haga la mitad de la conferencia sobre tecnología, y la otra mitad sobre por qué en Japón se fabrican tantos robots humanoides”. Me dio la impresión de que allí aún existe una reacción fundamental hacia los autómatas con forma humana, causada por la influencia de la religión cristiana, que parece decir que ‘no se deben realizar los mismos actos que Dios, que creó a los humanos’.
En la actualidad, también en Europa los fondos han empezado a concederse a aquellas investigaciones que tratan de comprender al ser humano a través de la fabricación de robots humanoides. No obstante, en Europa es tecnológicamente complicado desarrollar robots de tamaño similar al humano, que puedan caminar sobre dos piernas. Para ese tipo de robots se están realizando investigaciones conjuntas con nosotros, de la Universidad de Waseda.
Mejorando la utilidad de los robots humanoides
ENTREVISTADOR ¿Qué es lo que persigue la investigación de robots humanoides en Japón? ¿Podría darnos una visión de una sociedad en la que los robots desplegaran sus habilidades?
TAKANISHI Hace casi medio siglo que el Dr. Katō comenzó su investigación sobre los robots humanoides, pero creo que no se han aprovechado los resultados en la socidad, en el sentido real. La ingeniería, a diferencia de la ciencia, que trata de comprender lo desconocido, busca diseñar cosas útiles por el bien de la humanidad. Por lo tanto, como uno de los investigadores que siguen los pasos del Dr. Katō, creo que es mi obligación seguir avanzando en la búsqueda de la utilidad real de los robots humanoides; además de la investigación en los robots bípedos me concentro en el desarrollo de técnicas que puedan resultar verdaderamente prácticas para la sociedad.
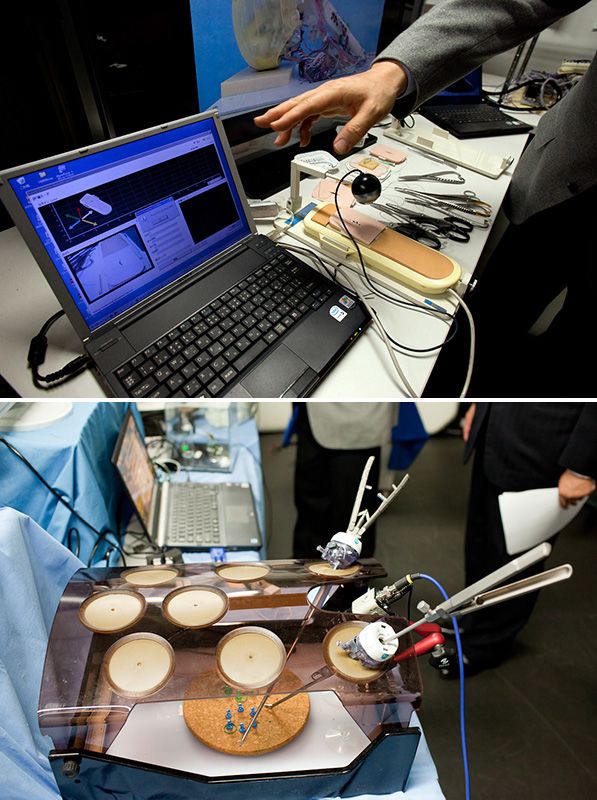
(Arriba) Simulador de evaluación de suturas. La puntuación aparece en el monitor del ordenador conectado.
(Abajo) La máquina que se usa para practicar la técnica de las operaciones con endoscopio.
Por ejemplo, para mejorar la capacidad de la gente que trabaja en cuidados médicos, hemos ido comprendiendo gradualmente que la tecnología de los robots humanoides puede ser útil. Por este motivo llevo varios años trabajando en el desarrollo de diversos productos con una compañía de Kioto, que ha producido varios simuladores de entrenamiento médico.
Uno de esos productos es un “simulador de evaluación de suturas” con el que se mide la capacidad de suturar piel artificial en comparación con el nivel superior, al que llaman “la mano de Dios”. Se trata de un sistema dotado de un sensor, capaz de evaluar la actuación entre cero y cien puntos, que se empezó a comercializar hace unos dos años.
Otro ejemplo es que, dado que cuando se usa anestesia general la respiración se detiene, previamente hay que meter un tubo por la boca que haga llegar el aire hasta los pulmones, una técnica considerada excepcionalmente difícil. En ese entrenamiento se usan muñecos, no sólo en Japón sino en todo el mundo, y aunque se haga tanta fuerza como para romper las cuerdas vocales no hay manera de comprobarlo en un muñeco; de modo que la actitud era “con que llegue hasta el final, hasta los pulmones, ya basta”. Empezamos a desarrollar conjuntamente nuestro producto pensando si no podríamos construir un sistema de puntuación, como se hace con el entrenamiento de las técnicas de cirugía. Creo que verá la luz durante este año. También hemos desarrollado máquinas para el entrenamiento de técnicas dentales.
Tengo la esperanza de que, en lo sucesivo, la aplicación de la tecnología de robots humanoides a los cuidados médicos abra un nuevo campo en el que puedan usar sus funciones para el bien de la humanidad.
La investigación con robots sigue los pasos de los humanos
ENTREVISTADOR ¿Cree que hay consecuencias impredecibles en lo relacionado con la investigación con robots humanoides?
TAKANISHI En los largos años que llevo investigando sobre los robots bípedos muchas veces he pensado: ‘Dado que ya pueden caminar hasta cierto punto, me gustaría hacerlos más útiles para las personas.’ En aquel momento pensé en sillas de ruedas y desplazadores eléctricos. Ese tipo de máquinas, por desgracia, aún no pueden salvar escaleras o subir y bajar grandes desniveles. El hecho de que las escaleras tengan la forma que tienen se debe a que los humanos tenemos dos piernas; cuando se trata de cuadrúpedos como los caballos les cuesta mucho subir escaleras. Al darme cuenta de esto empecé a pensar si no se podría construir una silla de ruedas con dos ejes que pudiera subir y bajar escaleras. Hablé con una empresa con la que había investigado conjuntamente la máquina de entrenamiento de cirugía dental, y empezamos a desarrollar un robot bípedo en el que se montara la gente, y que pudiera subir escaleras; es decir, una “silla de ruedas bípeda”.
El problema era que, si subíamos a una persona sobre el robot bípedo y hacíamos que se moviera, le faltaba algo de fuerza. Lo que se me ocurrió entonces fue imitar la forma de los músculos humanos. Los músculos de las personas se encuentran agrupados en haces paralelos, y eso permite que se muevan asombrosamente rápido, o que generen una gran cantidad de fuerza, o que puedan mover objetos con precisión. Al introducir este mecanismo, al tiempo que mantuvimos un peso de 65 kg, incluyendo las baterías, el robot fue capaz de caminar llevando a una persona de hasta 80 kg.
El peso y el centro de masas de la persona que se sube es diferente en cada caso, y siempre existía el problema de que al caminar el robot se balanceaba demasiado y corría el riesgo de caerse. En ese respecto diseñamos una técnica que impedía que el robot se cayera. Llevamos esta “silla de ruedas bípeda” a una exposición de robótica de Los Ángeles, EE.UU. en 2007, y a lo largo de varios días subieron a él cerca de 170 personas; el robot no se cayó ni una sola vez.
La teoría del Dr. Katō era que “para conseguir la funcionalidad y el movimiento real de una persona debemos comprender al ser humano desde el punto de vista de la robótica”. Los robots de antes tenían piernas que salían del cuerpo “de repente”, pero si nos fijamos bien en cómo es el cuerpo humano vamos que los muslos están conectados al cuerpo a través de la pelvis. Con esa idea en mente intentamos introducir la funcionalidad de la pelvis en el robot, y como resultado comprendimos que las rodillas pueden extenderse. Se puede decir vamos entendiendo paso a paso, por medio de la robótica, la estructura del cuerpo humano y nuestra forma de caminar como consecuencia fisioógica, y así seguimos los pasos de los humanos.
Para construir robots humanoides siempre investigamos con la vista puesta en los humanos, pero a partir del lanzamiento de la “silla bípeda” creo que ya hemos conseguido una experiencia que aprovecha los conocimientos obtenidos en nuestras investigaciones, con la que fabricar un robot útil para las personas.
Texto: Harano Jōji (Director de la Nippon Communications Foundation)
Imágenes: Matsuda Tadao
(Traducido al español del original en japonés)
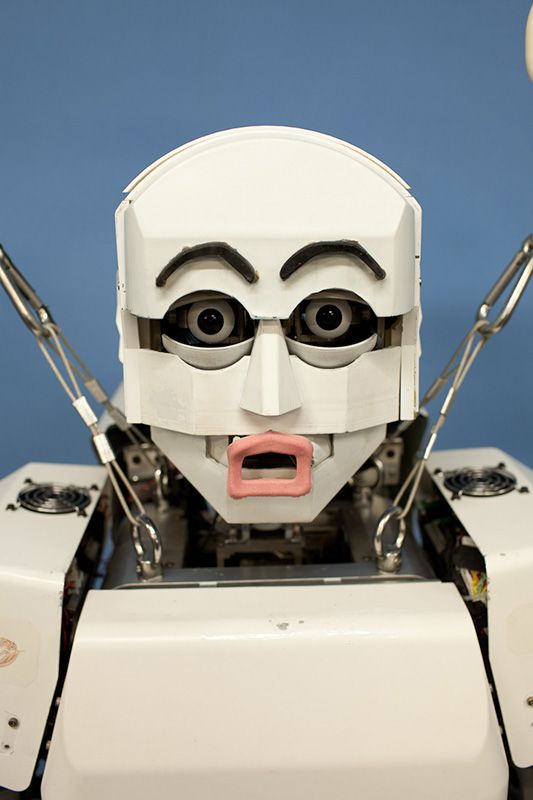
“Expresión de sorpresa” del KOBIAN-R
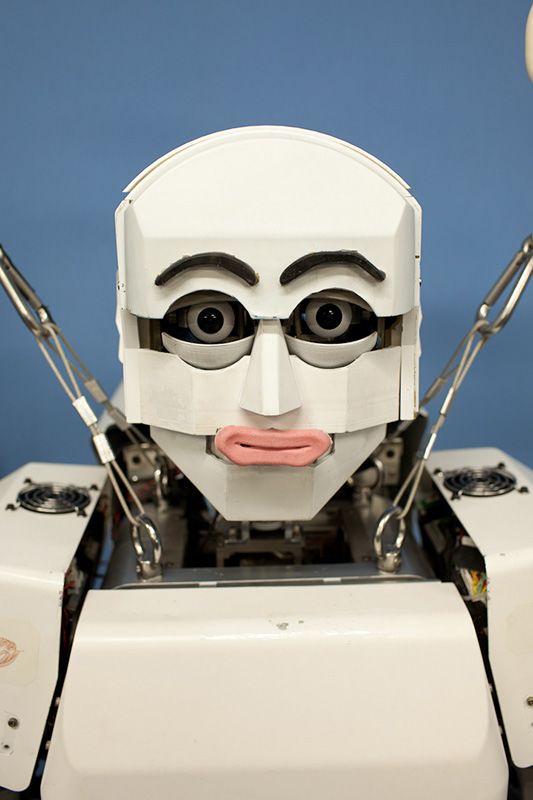
“Expresión natural” del KOBIAN-R
“Expresión de alegría” del KOBIAN-R
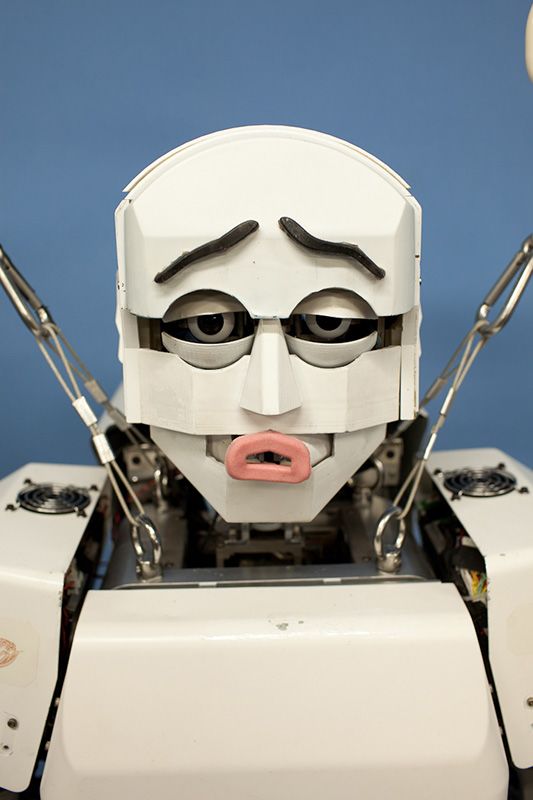
“Expresión de tristeza” del KOBIAN-R
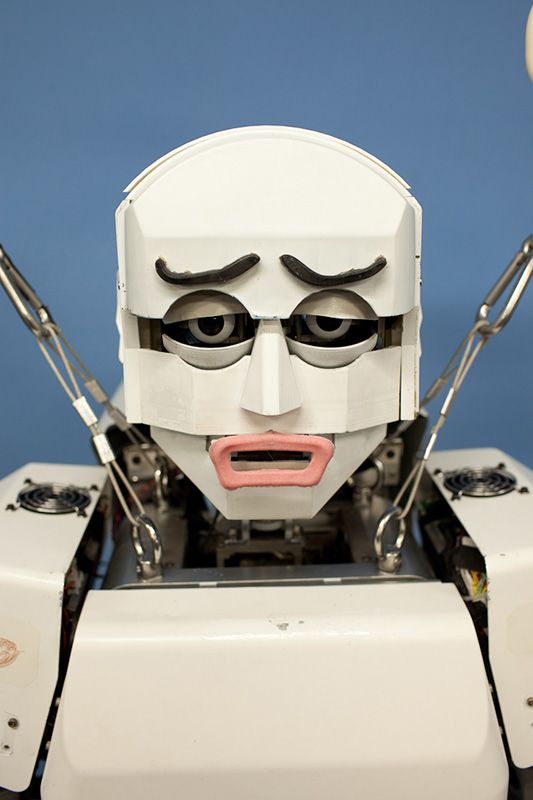
“Expresión de disgusto” del KOBIAN-R
robot tecnologia ingenieria envejecimiento Universidad de Waseda cuidados medicos fisiologia robots