
為何日本研究人員要製造人形機器人
科學 技術 社會 生活- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
1956年福岡縣出身,工學博士,早稻田大學創造理工學系綜合機械工學專業教授,該校類人機器人研究所所長。
——日本的人形機器人(*1)研究歷史很悠久啊。
「我的指導教授、已故的加藤一郎教授(*2)開始的正是人形機器人的研究。人形機器人研究之外,歷史上還出現了電腦技術的興起、機械自動化等工業浪潮。其中,活躍於工廠,歸類於工業機器人這一分類名稱中的機械,最初在美國銷售並獲得了巨大成功。機器人原來指的是人形機器人,但隨著上述機械的巨大成功,人們開始廣泛使用機器人這個詞彙,同時,機器人中人形這一層含義則逐漸地淡化。由於社會上的理解存在這種傾向,所以加藤教授在著手研究機器人時,特意加上了『人形』 這個修飾成分。
但是,當初研究題目中一旦出現『機器人』的字眼,人們就會基於對科幻小說的認識,認為是在製造孩子們胡言亂語中的機器,所以研究經費也很難申請下來。因此當時的資料中留下的研究經費申請書上,填寫的不是『機器人』,而是『人造手』或『人造腳』等的研究。」
目標是「人」。永無止境,欲罷不能
——日本的研究人員為何要製造人形機器人呢?
「人形機器人研究的最大問題或者說宿命,在於『存在人這個明確的目標』。或疾行或飛奔,甚或參與奧運或世界杯,具有出色的運動功能;另一方面,大腦高度發達,語言運用自如並發明出——如此偉大的人類是我們追求的目標。越想讓機器人接近人類,就越是痛感永無止境,令人欲罷不能。
不過機器人一直在進化。加藤教授製造WABOT-1全身型人形機器人時,雙足行走部分的功能是每一步約需45秒,步幅(指走路或跑步時,同一腳掌兩次著地間的距離──譯註)也只有10cm左右;而如今,可是有了會跑步的雙足行走機器人。高西研究室的機器人KOBIAN,其步行速度基本上和人類一樣,每步不到1秒,步幅最大也達到了40cm。我認為,可以說這已是能夠屈伸膝蓋和人一樣行走的機器人了。
由於電腦的進步,最近機器人也開始具備圖像處理等高級功能,包括和人類交流在內,正一步步向高性能發展。」
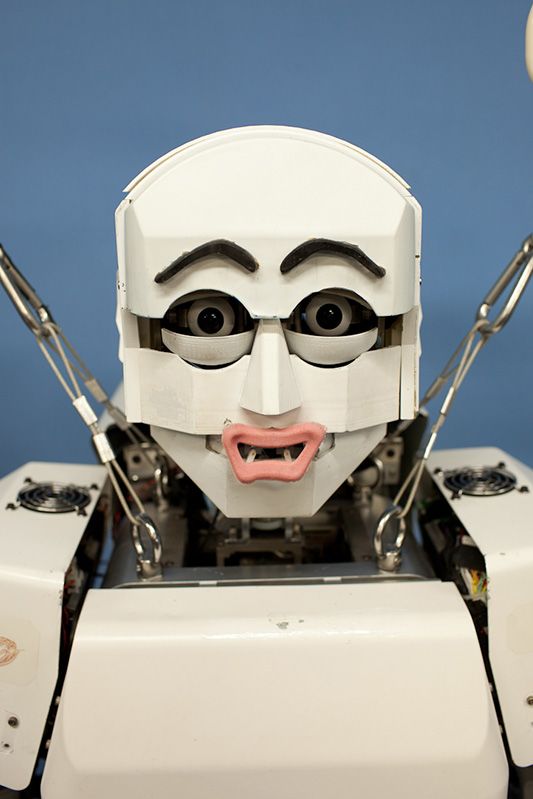
 雙腳行走仿人機器人KOBIAN-R。除了雙腳行走外,還能夠表現多種表情(請參照文末圖片集)。照片為「吃驚造型」
雙腳行走仿人機器人KOBIAN-R。除了雙腳行走外,還能夠表現多種表情(請參照文末圖片集)。照片為「吃驚造型」
 人形薩克斯風演奏機器人WAS-2RII。「上下活動上唇能夠改變音壓,上下活動下唇能夠改變音程。」(高西先生)
人形薩克斯風演奏機器人WAS-2RII。「上下活動上唇能夠改變音壓,上下活動下唇能夠改變音程。」(高西先生)
——受宗教等社會性因素影響,日本和歐美對機器人的研究態度和傾向是否有所不同呢?
「去年,我因為講演等活動去了德國、荷蘭。對方提出『技術方面的話題大約占用一半時間,剩下一半請您給我們講講為什麼只在日本會有這麼多仿人機器人吧』。這讓我感到,在他們的意識深處『造人非上帝不能為之』這種基督教的影響可謂根深蒂固,對人形自動機器從根本上還存在抵觸情緒。
如今在歐洲,人們試圖利用人形機器人解讀人類,如果是用作為道具的人形機器人,也逐漸能夠申請到研究資金了。然而和人類大小相同、能夠像人類一樣雙足行走的機器人,歐洲在技術上還處於困難狀況。關於這方面技術,他們向早稻田大學提出請求,目前雙方正在開展共同研究。」
將人形機器人技術提高到真正發揮作用的階段
——日本人形機器人研究的目標是什麼呢?請您介紹一下對人形機器人活躍於社會的展望,以及尚未解決的課題。
「我認為雖然加藤教授開始人形機器人的研究已將近半個世紀,可是人形機器人尚未在真正意義上應用於社會。它和那些以弄清未知事物為目標的科學不同,工程學的目標在於怎樣去設計對人類幸福有用的東西。因此,作為繼承加藤教授衣缽的研究人員之一,我認為人形機器人技術必須要跨入真正發揮作用的階段,所以在進行雙足行走機器人研究之餘,我還傾注精力進行真正有助於社會的技術開發工作。
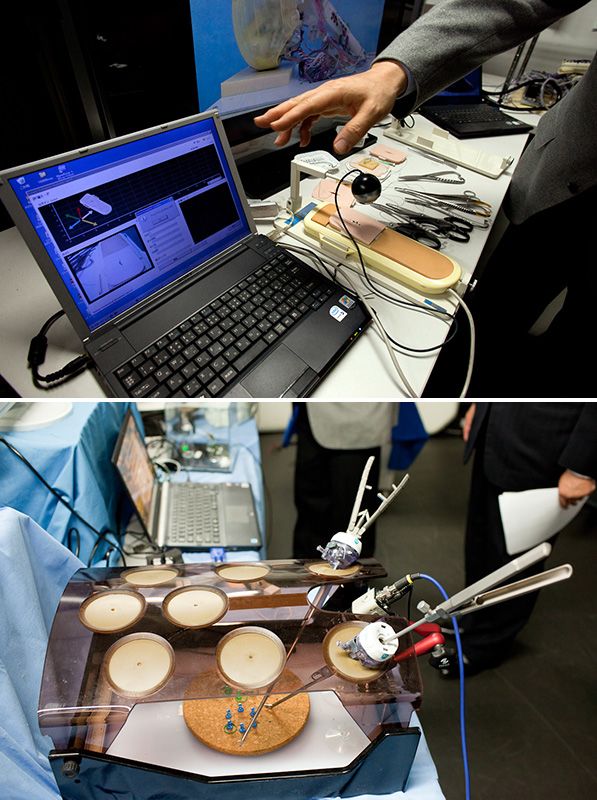
(上)縫合技術評估模擬裝置。電腦螢幕上自動顯示評分結果
(下)內視鏡手術的訓練也可用機器進行
例如,我逐漸發現,人形機器人有助於提高醫療工作人員的技術熟練程度,因此這些年和京都一家開發醫療訓練用模擬裝置的企業一起,開始共同開發相關的各種產品。
其中一個是人工皮膚『縫合技術評估模擬裝置』,用它可以評估新手與享有『神之手』美譽的優秀外科醫生之間的水準差距。這套帶有感測器的系統,可在0-100分之間評分,大約在兩年前產品化,並在市面上銷售。
另外,手術中全身麻醉後呼吸會停止,所以需要事先將軟管從口腔插入肺部,這是一項非常高難度的技術。日本和世界其它國家都是使用人偶進行這項訓練的,因此,即使力量過大刺破聲帶也無從確認,形成『最後插到了肺裏就行了』這種狀態。我們想不能這樣,應該製造一種和外科手術手法技術訓練一樣用數值評估的裝置,於是開始了共同開發。我想年內該產品可以發售。在牙科領域也有類似訓練機器的開發實例。
我認為這些醫療相關機器今後將不斷發展成為人形機器人技術最先得以廣泛應用的技術領域,並對此寄予極大的期望。」
機器人研究是對人類的追尋。這份積累使新技術開發成為可能
——在人形機器人研究過程中,是否有過一些意料之外的成果呢?
「長期從事雙足行走機器人的研究,有一次我忽然想『機器人在一定程度上已經可以行走了,真想讓它為人類發揮更大作用』。當時我腦海中浮現的是輪椅和電動輪椅。非常可惜的是這兩樣東西都還不能上下或者高度差較大的臺階。臺階設計成那種形狀是因為人類用雙足行走,對於馬這種四足動物來說上臺階應該非常困難。注意到這點後,我靈機一動:『將車輪改為兩條腿不就能上下臺階了嗎?』於是,我向共同研究牙科訓練機器的公司提出這個想法,開始了載人上下臺階的雙足行走機器人,也就是『雙足輪椅』機器人的開發。
問題是要讓雙足行走機器人載人後行走,則力量稍顯不夠。這時我們想到應該模仿人類肌肉的生成。人類的肌肉並排生長的,因此才能夠非常迅速地運動,使出非常巨大的力量,並非常精準地移動物體。通過採用這種結構,機器人主體重量加上電池後控制在大約65kg,同時最大能夠載乘體重80kg的人行走。
只是還存在另一個問題,那就是乘坐人的體重和重心位置每次都不相同,機器人一旦走起來有可能晃動變大從而翻倒。因此我們又開發了機器人靈活適應不同條件以防止翻倒的技術。我們將這種『雙足輪椅』帶到2007年美國洛杉磯機器人展示會上,短短數日內試乘這種輪椅的美國人共計170人次,沒有出現一次翻倒等情況。
『如果能再現人類的機能和運動,這就表示從機器人工學角度來看,已經弄清楚了人類』,這是加藤教授的一貫主張。曾經的機器人,腳都是直接從身體中伸出的,但是仔細觀察人體,就會發現原來還有骨盆夾在中間。注意到這一點,試著在機器人中加入骨盆的功能後,結果發現膝蓋能夠伸展了。也就是說,首先有人體的結構,其結果形成了這種行走方式,對此我們在使用機器人同時進行著追尋探索。
為製造人形機器人,我們總是一邊觀察人類一邊進行研究,但是通過的『雙足輪椅』開發,我認為我們體會到,『研究中積累的人體資訊在製造有助於人類的機器人時,將繼續發揮出人意料的作用』。」
採訪人:原野城治(Nippon Communications Foundation代表理事)
攝影:松田忠雄
機器人研究的歷史(高西先生主編)
| 時間 | 動向 |
|---|---|
| 公元前3世紀 | 希臘神話中青銅巨人塔羅斯登場 |
| 公元前25年左右 | 「包括道具在內的機械全部都是人體器官在外界的投影」器官投影說誕生。效仿人類的機械技術開始起步 |
| 1世紀 | 應用虹吸原理製造出自動門等自動機械裝置 |
| 12世紀 | 鐘錶技術進步,開始了精密機械製造 |
| 17世紀 | 自動玩偶(Automata)的時代(歐美) |
| 自動裝置的時代(日本) | |
| 19世紀 | 誕生了「若能像鐘錶那樣精確地運動,即可使用這個原理製造人類」的想法 |
| 蒸汽機發明、工業革命 | |
| 「Android」一詞誕生,意思是和人類一模一樣的機器 | |
| 20世紀 | 電腦發明 |
| 取得工業機器人的專利(美國,1954年) | |
| 世界首個人形機器人WABOT-1開發(日本,1973年) | |
| 工業機器人市場迅速發展→機器人元年(1980年) |
KOBIAN-R“吃驚的表情”
KOBIAN-R“自然的表情”
KOBIAN-R“高興的表情”
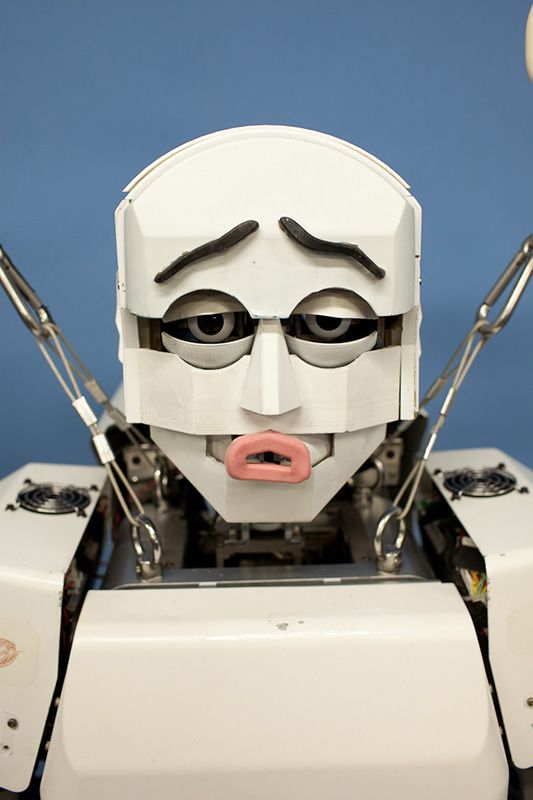
KOBIAN-R“悲傷的表情”
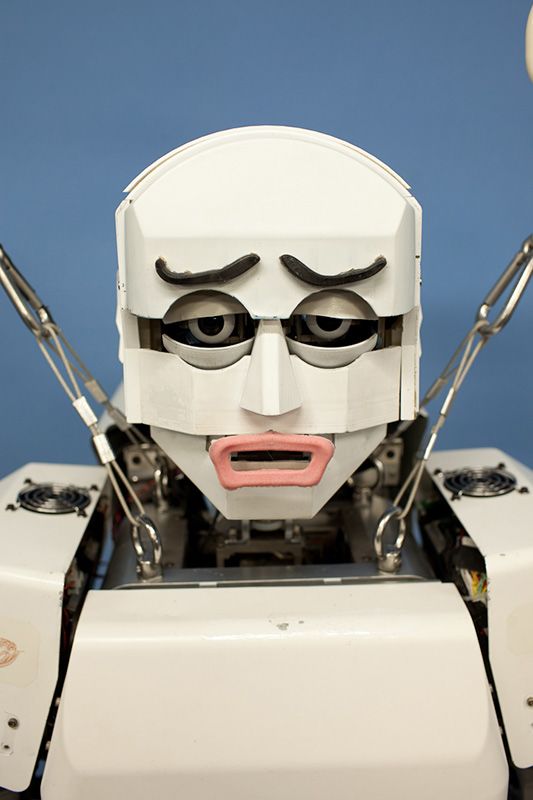
KOBIAN-R“厭惡的表情”
松田忠雄 原野城治 機器人 早稻田 創造理學部 綜合機械工學科 人形機器人(Humanoid robot) 麻薩諸塞州 聖安娜 聖誕節演說 我的機器人 人類機器人的故事高 西淳夫 加藤一郎 WABOT-1 雙足行走 KOBIAN-R 縫合技術評估模擬裝置 氣管插管訓練模擬裝置 雙足輪椅 塔羅斯 器官投影說 自動玩偶(Automata) 機關人偶 Android 卡雷爾·恰佩克 羅素姆萬能機器人 日本機器人工業會 JARA