日本“机器人革命”拉开序幕
财经 科学 技术 社会- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
一段时间以来处于“横盘”状态的日本机器人产业终于开始迎来了曙光。
2014年6月,日本政府推出了新的经济增长战略,“基于机器人的产业革命”被确定为该战略的一大支柱,年内还将制定关于机器人具体利用措施的五年计划。此外,就在同一个月,软银(Softbank)推出了全新人形(humanoid)机器人“Pepper”。该款机器人预定于明年2月上市销售,低得“出格”的19万8千日元定价震惊了整个业界。
在人形机器人领域先行一步的日本
 清水正晴生于1974年。自进入在青山学院大学研究生院从事机器人研究的富山健教授的研究室以来,长期从事机器人系统架构研发工作。曾供职于科学技术振兴机构,2003年加入千叶工业大学未来机器人技术研究中心(fuRo)(图片:山田慎二)
清水正晴生于1974年。自进入在青山学院大学研究生院从事机器人研究的富山健教授的研究室以来,长期从事机器人系统架构研发工作。曾供职于科学技术振兴机构,2003年加入千叶工业大学未来机器人技术研究中心(fuRo)(图片:山田慎二)
千叶工业大学未来机器人技术研究中心(fuRo)主任研究员清水正晴表示:“日本在双腿可行走人形机器人研发领域一直领先于世界。我认为很大一个背景原因在于动漫的影响。许多研究机器人的人员都受到了《铁臂阿童木》和《哆啦A梦》等动漫的影响。”“凭借人形机器人系统架构研究获得博士学位的我本人就是‘高达一代’,多多少少受到过高达的影响。”
在日本的人形机器人研发历史上,本田的“ASIMO”是一个重要的里程碑。本田的机器人开发工作始于1986年。据说当时机器人直立行走本身就是一件新鲜事儿,双腿行走的技术开发非常困难。ASIMO正式推出是在2000年,而自从本田在上世纪90年代中期展示P2、P3等原型机后,研究人员圈子里便掀起了双腿行走机器人的开发热潮。目前,机器人双腿行走技术发展到何种程度了呢?
“起初曾是一个难题的双腿行走技术近年来发展到了可以做出跑步动作的程度,已经取得了一定的成果。不过,这终究只是停留在实验水平,或者说宣传展示水平,尚未达到在现实环境中为我们提供有用服务等可以作为‘工具’发挥作用的技术应用水平。”
双腿行走机器人技术将为我们创造的未来
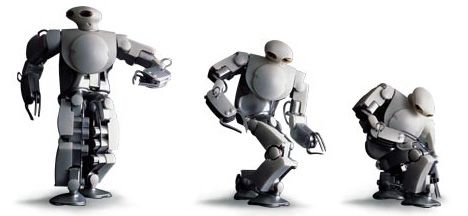 morph3是科学技术振兴机构ERATO北野共生系统项目与工业设计师山中俊治共同开发的机器人。morph3的研发团队于2003年6月1日加入千叶工业大学未来机器人技术研究中心(fuRo),研发工作得以继续推进©fuRo
morph3是科学技术振兴机构ERATO北野共生系统项目与工业设计师山中俊治共同开发的机器人。morph3的研发团队于2003年6月1日加入千叶工业大学未来机器人技术研究中心(fuRo),研发工作得以继续推进©fuRo
清水先生在千叶工大参与开发的人形机器人“morph3”(视频)的理念是“金属运动员(metal athlete)”,即关节可动范围大、运动性能极高的小型轻量机器人。据说,这种拥有高度身体功能的桌面型机器人相关技术或许可用于开发在未来远距离沟通时具有身体性质的界面装置(Interface Device)。
“打个比方,我们在与身处远方的某人握手时的力量反馈可以通过双方身边的小型人形机器人传达给彼此。虽然视觉和听觉上的信息传递可以借助网络在手机和电脑上实现,但触觉和力量传递则需要机器人技术。”目前千叶工大正在开发的双腿行走机器人是名为‘core’(视频)的搭载负重型机器人。它一次能搬运100公斤的物品,负重性能在全球同类机器人中处于最高水平。清水先生将之定位为一种“为腿脚残障人士、能够行走但体力较弱却又想登山的人士提供一种上下台阶或登山时乘坐的未来交通工具的基础性研发事业”。
“关于研发人形机器人的意义,人们经常会用F1赛车来比喻。虽然F1赛车是汽车的延伸,但并不是那种配置的赛车直接行驶在公路上,而是通过研发最尖端的技术,促使其技术要素被那些对大众有用的应用技术吸收。”
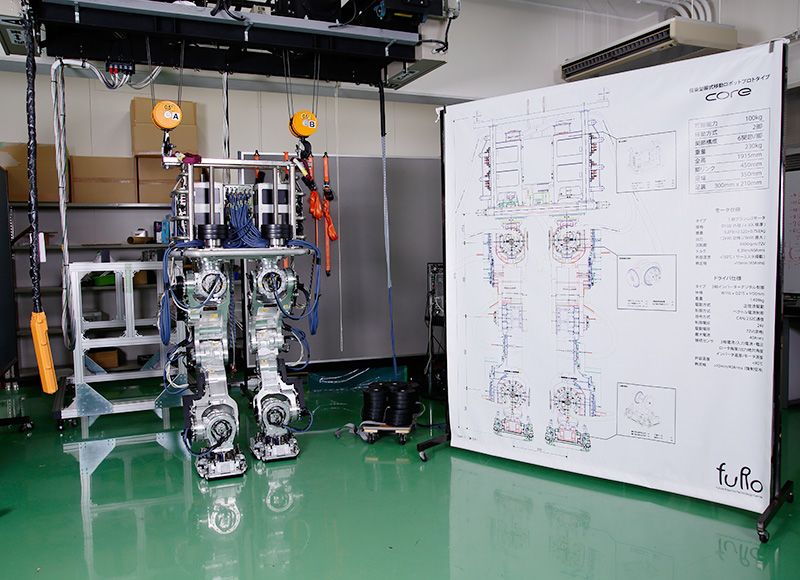 可承载100公斤的人或物品移动的未来型双腿行走机器人“core”(图片:山田慎二)
可承载100公斤的人或物品移动的未来型双腿行走机器人“core”(图片:山田慎二)
在核电站事故中大显身手的灾害应对机器人
相对于具有通用性的人形机器人,能够在灾害发生时执行特殊任务的机器人叫做灾害应对机器人。2011年3月东日本大地震引发福岛核电站事故以后,人们开始强烈地意识到其重要性。
最早投入福岛第一核电站的国产机器人是千叶工大开发的“核电站通用版Quince”,而首先进入核反应堆厂房的则是美国生产的机器人“PackBot”。
清水先生回忆称:“当时,‘日本明明在机器人研发领域快人一步,为什么先投入了美国的机器人’‘难道不能用ASIMO吗’之类的议论声四起。可是,日本的人形机器人尚处在展示技术的宣传或娱乐水平。”
“PackBot原本是军事侦察用爬行式机器人,虽然可以胜任辐射环境下的工作,但论及在废墟表面移动和攀爬狭窄陡坡等性能,还是我们开发的Quince更胜一筹。Quince是1995年神户地震后,以在废墟中进行搜索为设定工作环境而开发的一款机器人。由于它并非针对核电站环境设计的,所以花费了3个月左右的时间实施防辐射等改进处理后才投入到现场,它登上了厂房五楼,用摄像头拍摄了现场的情况。”
“遗憾的是,最初投入现场并首次成功拍摄到厂房五楼情况的Quince1号机在结束任务返程途中被三楼的缆线缠住而无法动弹。后来,针对这一问题进一步加以改良的2号、3号机被投入现场,再次对五楼实施调查后顺利返回,现在仍经常被用于开展调查活动。”
作为Quince的后续改良机型,千叶工大开发出了“樱壹号”和“樱贰号”,它们从设计之初就考虑到了应对核电站事故的要求。樱壹号的个头比Quince小得多,可以在更加狭小的环境中作业。樱贰号可以选装长达两米左右的机械臂,机械臂前端配有摄像头,能够伸到较高位置或机器人本体无法进入的狭小空间观察情况。
东大创办的风险企业在灾害应对机器人竞技大赛中获胜
如上所述,日本立足于“3・11”地震中反映出来的课题,不断对灾害应对机器人加以改良,而美国则一直致力于开展旨在将具有高度通用性的人形机器人用于灾害应对的研发工作。2013年末,美国国防高级研究规划局(DARPA)主办了“DARPA Robotics Challenge(DRC)”机器人竞技大赛,宗旨是推进可在假定会引发核电站事故的灾害发生时实施应急处理的机器人开发工作。参赛机器人需要完成包括驾驶车辆等8个任务,显然是按照类人机器人标准来设定的。清水先生获得了在美国考察此项赛事的机会。
“最终,诞生自东京大学的风险企业‘SCHAFT’夺得了冠军。这款机器人拥有双腿和双手,和人体的不同之处在于它不分前后,形状结构可灵活应对灾害现场作业。不过,在完成废墟表面移动这项任务时,它却花费了较多时间,完全无法与爬行机器人竞争。”
“从整体结果来看,除了在比赛中使用从DARPA租借的人形机器人‘ATLAS’那一组外,排名靠前的均为采用了ape型—四腿行走或通过腿上的履带移动的机器人,即所谓非人形机器人。人形机器人身上许多需要改善的课题清晰地显现了出来。话虽如此,但看到SCHAFT的表现,我切实感受到日本人形机器人的技术水平还是很高的。不过该公司在2013年11月已被谷歌收购……”
 SCHAFT公司的机器人驾驶车辆©DARPA
SCHAFT公司的机器人驾驶车辆©DARPA
日美联合开发机器人的好处
日本与美国已就实施灾害应对机器人的联合研发与实证项目达成了共识。据说双方也将在日本推动相关开发工作,创造有能力参加DRC的机器人。清水先生表示:“美国已经认识到日本人形机器人的技术高度,希望更多地吸收日本的原创技术。”
如果说吸收日本的机器人技术对美国是好事,那么对于日本而言的好处又是什么呢?“像DRC那样包下整个赛车场,通过完成各种任务的形式举行声势浩大的展示说明并进行基准测试这样的行动意义重大。之后的机器人开发将实现飞跃式的加速。”
“在经济产业省的呼吁下,千叶工大也与东京大学、大阪大学、神户大学组成了联合团队,致力于开发双腿双手人形机器人以参加2015年6月的DRC。想必我们可以充分运用通过樱壹号和贰号积累的灾害应对经验。”
美国的收购潮,机器人市场“开花结果”的征兆
最近几年,以相继收购了包括SCHAFT在内的多家机器人风险企业的谷歌为代表,美国的IT巨头和有实力的风险企业孵化器一直在加快对机器人技术的投资步伐。清水先生表示,可以说美国如今正掀起一股“机器人热潮”。
“美国的民间企业似乎都认准了只要再努一把力,机器人技术就会‘开花结果’。而日本长期以来在国家项目等官方和民间各层面都已经投入了相当大的前期投资。或许正是因为先行了一步,所以在投入了资金却无法让机器人实现实用化、商业化的状况下,人们对进一步积极投资表现出了犹豫不定的态度。”
人们逐渐认识到,即便是在有助于提高生活水平的日常领域,机器人技术也有用武之地。美国企业iRobot于2002年推出的扫地机器人“Roomba”已经成为全球畅销商品。而在日本国内,东芝和夏普等公司近年来也终于推出了扫地机器人。
 推出具有情感识别功能的机器人“Pepper”的软银公司总经理孙正义(右端)与其子公司法国Aldebaran公司首席执行官布鲁诺・梅佐聂(2014年6月5日,时事通讯社)
推出具有情感识别功能的机器人“Pepper”的软银公司总经理孙正义(右端)与其子公司法国Aldebaran公司首席执行官布鲁诺・梅佐聂(2014年6月5日,时事通讯社)
清水先生表示,在激活家用机器人市场这个意义上,孙正义于2012年收购法国Aldebaran Robotics,开发出Pepper的举动对日本的机器人产业而言也是一股蕴含巨大推动力量的顺风。“日本也有一部分投资者、经营者敏锐地察觉到了机器人技术即将开花结果的转折点,这就赋予了我们勇气和决心。”
清水先生认为机器人开发工作的“创造性”在于“新事物的诞生与活动”,他希望开发者再次燃烧起对这种“创造性”的激情。
“针对服务型机器人产业发展停滞的问题,有人认为,首先应该甄别消费者需求,整合当下的技术,创造出有用的产品,不能打开市场的开发行为是难以获得预算的。这种观点也没有错。但如果仅仅是如此,就不会产生新事物。深入思考自己期待的东西,并使之问世,让大家都感到期待,这便是最幸福的事情。我再次体会到了自己迈入机器人研发道路之初的那种快乐、那种激情,我觉得支撑这种激情的环境已经形成。”
(nippon.com编辑部根据2014年8月19日采访内容编辑而成。标题图片:山田慎二)