
Japan’s Robots: Becoming More Human
Leading the World in Humanoid Robotics
Science Technology Society Lifestyle- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
According to Waseda University Professor Takanishi Atsuo, the term “robot” was first used by the Czech playwright Karel Čapek in his play R.U.R. (Rossum's Universal Robots). The word robota means “serf labor,” and figuratively “drudgery” or “hard work” in Czech, and also “work” or “labor” in many Slavic languages. These days it is common to call a machine that mimics the human form and function a humanoid robot. The Japan Robot Association states that in 2010 around 286,000 operating robots were used in industry in Japan. This is 27% of the global figure of 1,035,000, making Japan the leading country in the world. We talked to Takanishi about the field of robotics in Japan and around the world.
 Born in 1956. Earned his PhD in engineering. Director of the Humanoid Robotics Institute and professor in the Department of Modern Mechanical Engineering at Waseda University.
Born in 1956. Earned his PhD in engineering. Director of the Humanoid Robotics Institute and professor in the Department of Modern Mechanical Engineering at Waseda University.
INTERVIEWER Can you comment on Japan’s long history of research into humanoid robots?
TAKANISHI ATSUO My old academic supervisor, the late Katō Ichirō, started the research into humanoid robots. As a professor at Waseda University, he was part of the cross-departmental group that developed the world’s first humanoid robot, WABOT-1. At the time, computing technology and machine automation in industry was in its ascendancy. Machines used inside factories came to be known as industrialized robots and were sold in the United States, achieving great success. Originally the term robot was generally understood to describe a machine in humanoid form, but following the success of the machines in industry, the term came to bear a wider variety of meanings and connotations. Because of that trend, Katō attached the adjective “humanoid” when he began the research.
At the beginning it was difficult to secure funding because the word “robot” sounded like something from science fiction rather than serious academic research. Potential backers tended to think that the machines they were developing were childish nonsense. In the documents of the time, you can see that in their applications for funds they wrote that they were conducting research into “artificial hands” or “artificial legs,” instead of mentioning robots.
The Forever Unattainable Goal of Human Likeness
INTERVIEWER Why are Japan’s researchers making humanoid robots?
TAKANISHI The major goal in humanoid robotics research, or its fate if you will, is to match the human form. Our goal is to create a robot that can do all of the things that an excellent human specimen could do: walk briskly, run, or even compete in the Olympic Games or the soccer World Cup. The goal covers mental faculties too: to emulate humans that can talk freely, that can invent new forms of written communication, and that generally possess a high degree of brain functionality. However, the more that you try to make robots imitate humans, the more you become painfully aware that this goal will never be achieved. The work will never be over.
Having said that, we are seeing progress. When Katō made the humanlike robot WABOT-1, the bipedal section took 45 seconds to take a single step and the stride length was only 10 centimeters. Now there are bipedal robots that can run. The KOBIAN robot built at the Takanishi Laboratory moves at over one step per second, which is about the same as a human. Its stride length reaches a maximum of 40 centimeters. I think it’s safe to say that this robot is able to walk just like a human, bending and extending the knee before planting its feet. This is a big improvement over its predecessors.
Thanks to the development of computing technology, robots have recently become capable of high-level functionality like image recognition and some communication with people. I think this trend will continue.
 The bipedal humanoid robot KOBIAN-R. The robot can walk and is also capable of facial expressions (see the gallery at the end of the article). The photo above illustrates the robot’s “surprised pose.”
The bipedal humanoid robot KOBIAN-R. The robot can walk and is also capable of facial expressions (see the gallery at the end of the article). The photo above illustrates the robot’s “surprised pose.”
 The saxophone playing robot WAS-2RII. Takanishi: “It controls the volume by moving its upper lip up and down. By adjusting its bottom lip, it controls the pitch.”
The saxophone playing robot WAS-2RII. Takanishi: “It controls the volume by moving its upper lip up and down. By adjusting its bottom lip, it controls the pitch.”
INTERVIEWER Do the trends and attitudes in robotics research differ between Japan and the West?
TAKANISHI Last year I went to Germany and the Netherlands to give talks on robotics. I was asked to spend half of my time discussing the technology and the remaining time explaining why only Japan has so many humanoid robots. I got the impression that Christianity influences the discussion over there. It says that you mustn’t construct a human since this is something that God does. In the West I think there are still fundamental objections to building an automated machine in the shape of a person.
Despite this, even in Europe research into humanoid robotics is being funded if the robots have useful applications or if they can be used to better explain some aspect of humanity. Constructing a robot that is the same size as a human and that can walk on two legs is, however, still technically difficult in Europe. For those kinds of robots, European researchers approached Waseda University, and we’re working together now.
Making Humanoid Robots Truly Useful
INTERVIEWER What are your objectives with your research into humanoid robots? Could they help to improve society?
TAKANISHI Even though half a century has elapsed since Katō began his research, I don’t think there are any truly humanoid robots being used anywhere in the world. Unlike science, which seeks to explain the unknown, the goal of engineering is to work out how to design things that are useful in order to make people happy. As one person walking in the footsteps of Katō, I believe that humanoid robotic technology really has to reach a stage where it has useful applications. At the moment, in addition to research into bipedal robotics, I’m putting a lot of energy into developing technology that will really make a difference in the world.
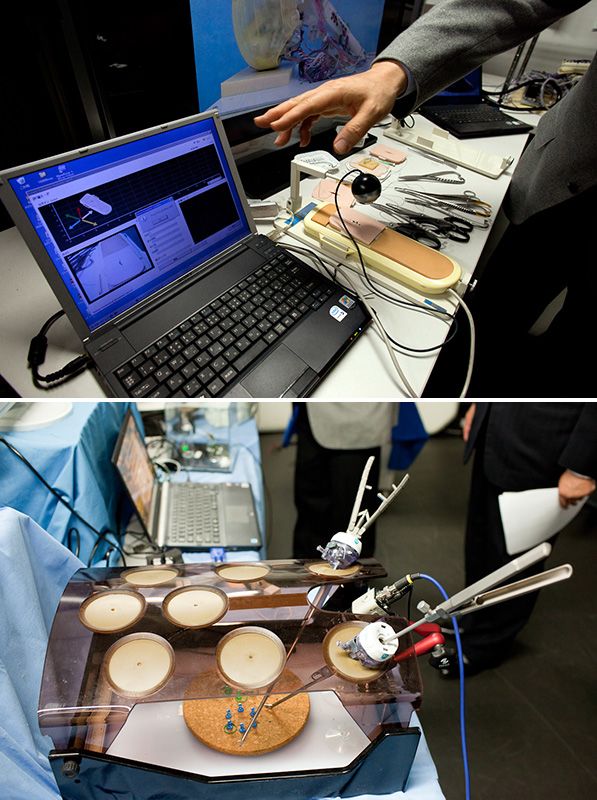 (Above) The suture skill evaluation simulator. The score appears on the connected computer screen. (Below) It is now possible to use a machine to practice endoscopies.
(Above) The suture skill evaluation simulator. The score appears on the connected computer screen. (Below) It is now possible to use a machine to practice endoscopies.
For example, it’s become increasingly clear that humanoid robots can improve the proficiency of health professionals. I’ve been working with a business in Kyoto that is developing a simulator used for medical training. Over the past few years we’ve jointly developed various products.
One of these is the suture skill evaluation simulator, which is artificial skin that measures how well a surgeon can sew stitches. Using a system based on input from sensors, it produces a score between 0 and 100. We’ve been selling the product for two years now.
Here’s another example. Since general anesthetic can cause respiratory problems during surgery, a tube is inserted into the lungs beforehand. It is said that this is an extremely difficult procedure to perform, so surgeons in Japan and all over the world practice on dolls. However, using these dolls, there is no way to tell if the force you applied would have ruptured the vocal chords. All that can be confirmed is whether the tube has successfully been inserted into the lungs. We began joint development with the aim of making something that could provide a numerical evaluation in a similar manner to the suture skill evaluation simulator. We’ll probably release this product by the end of 2012. And there’s another similar machine now in development that will help to train dentists.
I expect that medical machinery will be the first field where humanoid robot technology will be extremely useful in many different circumstances.
Discovering the Nature of the Human Form
INTERVIEWER Have there been results that you haven’t expected from your research into humanoid robots?
TAKANISHI After many years of research into bipedal robots, I thought for a moment, “The robot can walk fairly well now so I’d like to make it more useful.” The first thing that came to mind was wheelchairs. Stairs, or anything that involves stepping up and down, are still almost impossible for wheelchairs to negotiate. The reason that stairs are shaped the way they are is because humans walk on two legs. Horses and other four-legged animals find stairs difficult to climb and descend. When I realized this, I came up with the idea of making a wheelchair with two legs. I took the idea to the company that had jointly developed the training machine for dentists, and we started working on a robot that carries people and that can climb up and down stairs.
The problem was that if the robot has to carry a person in addition to its own weight, it doesn’t have enough power. When we encountered this problem, it occurred to us that we could mimic human muscles. The muscles in our body are composed of fibers arranged in parallel. Thanks to this arrangement, we can move extremely quickly, powerfully, and with a great deal of accuracy. By mimicking this construction, we managed to make a robot that weighs 65 kilograms with the battery included, and that can walk while carrying a person weighing up to 80 kilograms.
We had a solution to the power problem, but there was another issue to deal with. Every user’s weight and center of gravity differs, and this caused the robot to pitch and sway while walking, making it very likely to fall over. We developed technology that allows the robot to adjust to the person using it and remain upright. We took this two-legged wheelchair to an exhibition in Los Angeles in 2007 and invited people to try it. Over several days around 170 people used the wheelchair and not one person toppled the machine.
Katō believed that from a robotic engineering point of view, to successfully replicate human functions and movement is to better understand how humans work. I’ll give you an example. Robots used to have legs that poked abruptly and directly out of their bodies. But if you look at the human form, you see that we have a pelvis in between. By including the functionality of the pelvis into the robot, we can make the knees function more naturally as a result. What Katō meant, in other words, was that you can trace the relationship between the construction of the human body and the way that it walks.
In order to construct a humanoid robot, we’re always looking at the human body while doing our research. During the development of the two-legged wheelchair, I realized that the information robotics research has accumulated on the human body is of great use in building a robot that is useful to humans.
(Interviewed by Harano Jōji, publisher of Nippon.com, in May 2012. Photographs by Matsuda Tadao.)
History of Robotics Research (Edited by Takanishi Atsuo)
| 3rd Century BC | Talos, the giant man of bronze, appears in Greek mythology. |
| 25 BC | The theory is born that all tools and machines are projections of the human body’s organs to the outside world. The start of technology that mimics the human form. |
| 1st Century | Automatic doors and other automatic machines are constructed using the principle of siphons. |
| 12th Century | Clock technology is improved and more accurate machines are constructed. |
| 17th Century | The era of automatons (moving dolls) in the West. |
| The era of karakuri (wind-up dolls) in Japan. | |
| 19th Century | Birth of the idea that if an accurate clock can be built then the same principles might be used to build a human. |
| Invention of the steam engine; the Industrial Revolution. | |
| Birth of the term android, meaning a machine that looks just like a human. | |
| 20th Century | Invention of computers. |
| Industrial robots patented (United States, 1954). | |
| World’s first humanoid robot WABOT-1 is developed (Japan, 1973). | |
| The market for industrial robots grows rapidly. 1980 is known as “year one” for robotics in Japan. |
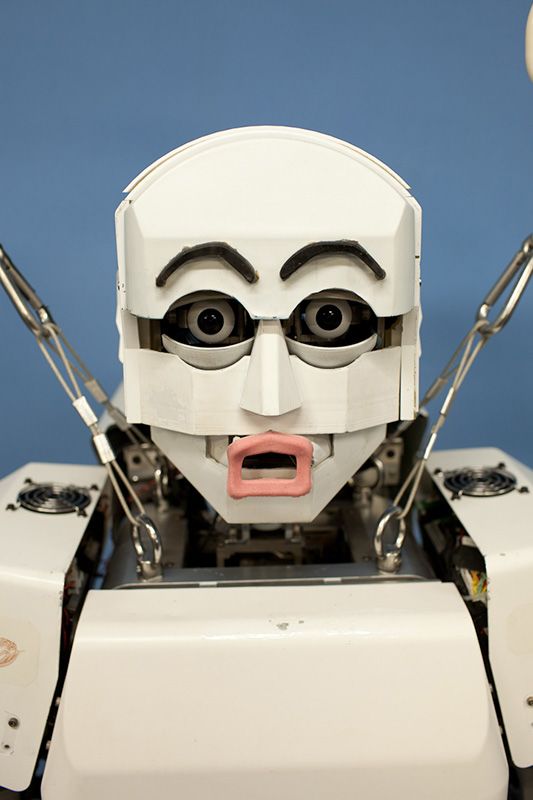
A surprised expression from KOBIAN-R
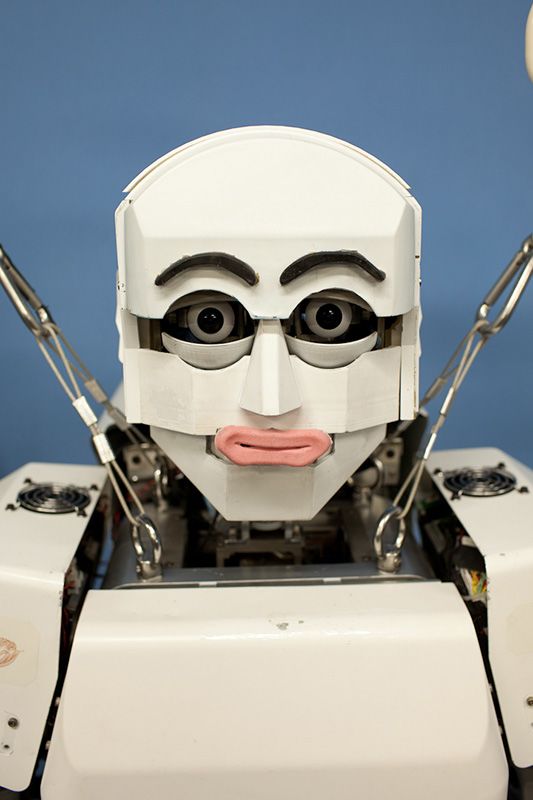
KOBIAN-R’s natural expression
KOBIAN-R’s happy face
KOBIAN-R’s sad face

KOBIAN-R’s expression of disgust
robot WABOT-1 KOBIAN-R karakuri Waseda humanoid robotics Takanishi Atsuo Kato Ichiro Talos automaton automata android modern mechanical engineering wheelchair bipedal medical machinery Harano Joji Matsuda Tadao Karel Capek Rossum