日本「機器人革命」拉開序幕
財經 科學 技術 社會- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
一段時間以來處於「橫盤」狀態的日本機器人產業終於開始迎來了曙光。
2014年6月,日本政府推出了新的經濟成長戰略,「基於機器人的產業革命」被確定為該戰略的一大支柱,年內還將制定關於機器人具體利用措施的五年計劃。此外,就在同一個月,軟體銀行公司(Softbank)推出了全新人形(humanoid)機器人「Pepper」。該款機器人預定於明年2月上市銷售,19萬8千日圓的低價震驚了整個業界。
在人形機器人領域先行一步的日本
 清水正晴生於1974年。自進入在青山學院大學研究所從事機器人研究的富山健教授的研究室以來,長期從事機器人系統架構研發工作。曾供職於科學技術振興機構,2003年加入千葉工業大學未來機器人技術研究中心(fuRo)(圖片:山田慎二)
清水正晴生於1974年。自進入在青山學院大學研究所從事機器人研究的富山健教授的研究室以來,長期從事機器人系統架構研發工作。曾供職於科學技術振興機構,2003年加入千葉工業大學未來機器人技術研究中心(fuRo)(圖片:山田慎二)
千葉工業大學未來機器人技術研究中心(fuRo)主任研究員清水正晴表示:「日本在雙腿可行走人形機器人研發領域一直領先於世界。我認為很大一個背景原因在於動漫的影響。許多研究機器人的人員都受到了《原子小金剛》和《哆啦A夢》等動漫的影響。」「憑藉人形機器人系統架構研究獲得博士學位的我本人就是『鋼彈一代』,多多少少受到過鋼彈的影響。」
在日本的人形機器人研發歷史上,本田的「ASIMO」是一個重要的里程碑。本田的機器人開發工作始於1986年。據說當時機器人直立行走本身就是一件新鮮事,雙腿行走的技術開發非常困難。ASIMO正式推出是在2000年,而自從本田在上世紀90年代中期展示P2、P3等原型機後,研究人員圈子裏便掀起了雙腿行走機器人的開發熱潮。目前,機器人雙腿行走技術發展到何種程度了呢?
「起初曾是一個難題的雙腿行走技術近年來發展到了可以做出跑步動作的程度,已經取得了一定的成果。不過,這終究只是停留在實驗水準,或者說宣傳展示水準,尚未達到在現實環境中為我們提供有用服務等可以作為『工具』發揮作用的技術應用水準。」
雙腿行走機器人技術將為我們創造的未來
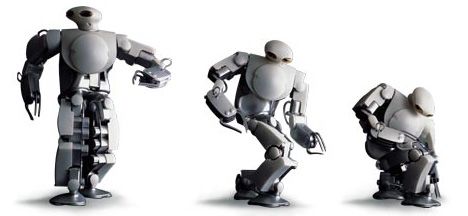 morph3是科學技術振興機構ERATO北野共生系統項目與工業設計師山中俊治共同開發的機器人。morph3的研發團隊於2003年6月1日加入千葉工業大學未來機器人技術研究中心(fuRo),研發工作得以繼續推進©fuRo
morph3是科學技術振興機構ERATO北野共生系統項目與工業設計師山中俊治共同開發的機器人。morph3的研發團隊於2003年6月1日加入千葉工業大學未來機器人技術研究中心(fuRo),研發工作得以繼續推進©fuRo
清水先生在千葉工大參與開發的人形機器人「morph3」(視訊)的理念是「金屬運動員(metal athlete)」,即關節可動範圍大、運動性能極高的小型輕量機器人。據說,這種擁有高度身體功能的桌面型機器人相關技術或許可用於開發在未來遠距離溝通時具有身體性質的界面裝置(Interface Device)。
「打個比方,我們在與身處遠方的某人握手時的力量反饋可以通過雙方身邊的小型人形機器人傳達給彼此。雖然視覺和聽覺上的資訊傳遞可以藉助網路在手機和電腦上實現,但觸覺和力量傳遞則需要機器人技術。」目前千葉工大正在開發的雙腿行走機器人是名為『core』(視訊)的搭載負重型機器人。它一次能搬運100kg的物品,負重性能在全球同類機器人中處於最高水準。清水先生將之定位為一種「為腿腳殘障人士、能夠行走但體力較弱卻又想登山的人士提供一種上下樓梯或登山時乘坐的未來交通工具的基礎性研發事業」。
「關於研發人形機器人的意義,人們經常會用F1賽車來比喻。雖然F1賽車是汽車的延伸,但並不是那種配置的賽車直接行駛在公路上,而是通過研發最尖端的技術,促使其技術要素被那些對大眾有用的應用技術吸收。」
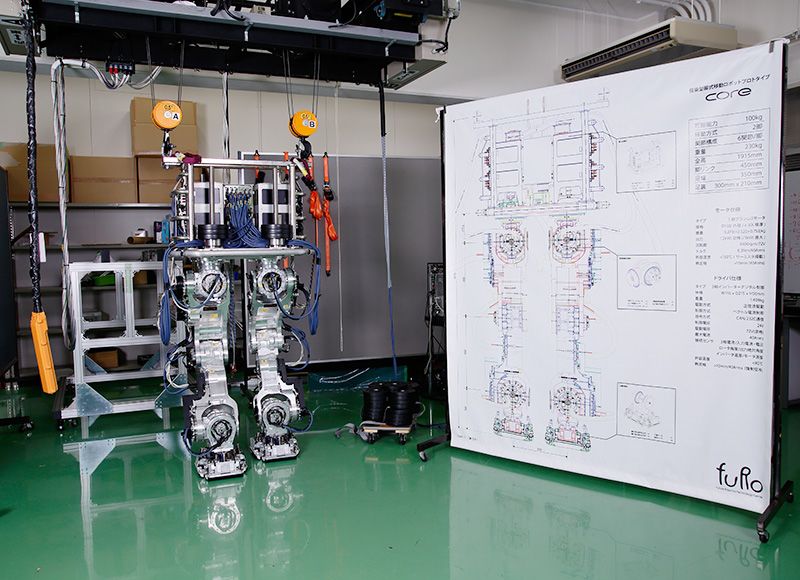 可承載100kg的人或物品移動的未來型雙腿行走機器人「core」(圖片:山田慎二)
可承載100kg的人或物品移動的未來型雙腿行走機器人「core」(圖片:山田慎二)
在核電廠事故中大顯身手的災害應對機器人
相對於具有通用性的人形機器人,能夠在災害發生時執行特殊任務的機器人叫做災害應對機器人。2011年3月東日本大地震引發福島核電廠事故以後,人們開始強烈地意識到其重要性。
最早投入福島第一核電廠的國產機器人是千葉工大開發的「核電廠通用版Quince」,而首先進入核反應爐廠房的則是美國生產的機器人「PackBot」。
清水先生回憶稱:「當時,『日本明明在機器人研發領域快人一步,為什麼先投入了美國的機器人』『難道不能用ASIMO嗎』之類的議論聲四起。可是,日本的人形機器人尚處在展示技術的宣傳或娛樂水準。」
「PackBot原本是軍事偵察用爬行式機器人,雖然可以勝任輻射環境下的工作,但論及在廢墟表面移動和攀爬狹窄陡坡等性能,還是我們開發的Quince更勝一籌。Quince是1995年神戶地震後,以在廢墟中進行搜索為設定工作環境而開發的一款機器人。由於它並非針對核電廠環境設計的,所以花費了3個月左右的時間實施防輻射等改進處理後才投入到現場,它登上了廠房5樓,用攝影機拍攝了現場的情況。」
「遺憾的是,最初投入現場並首次成功拍攝到廠房5樓情況的Quince1號機在結束任務返程途中被3樓的纜線纏住而無法動彈。後來,針對這一問題進一步加以改良的2號、3號機被投入現場,再次對5樓實施調查後順利返回,現在仍經常被用於開展調查活動。」
作為Quince的後續改良機型,千葉工大開發出了「櫻壹號」和「櫻貳號」,它們從設計之初就考慮到了應對核電廠事故的要求。櫻壹號的個子比Quince小得多,可以在更加狹小的環境中作業。櫻貳號可以選裝長達2m左右的機械臂,機械臂前端配置攝影機,能夠伸到較高位置或機器人本體無法進入的狹小空間觀察情況。
東大創辦的創業公司在災害應對機器人競技大賽中獲勝
如上所述,日本立足於「3・11」地震中反映出來的課題,不斷對災害應對機器人加以改良,而美國則一直致力於開展旨在將具有高度通用性的人形機器人用於災害應對的研發工作。2013年末,美國國防高級研究規劃局(DARPA)主辦了「DARPA Robotics Challenge(DRC)」機器人競技大賽,宗旨是推進可在假定會引發核電廠事故的災害發生時實施應急處理的機器人開發工作。參賽機器人需要完成包括駕駛車輛等8個任務,顯然是按照類人機器人標準來設定的。清水先生獲得了在美國考察此項賽事的機會。
「最終,誕生自東京大學的創業公司『SCHAFT』奪得了冠軍。這款機器人擁有雙腿和雙手,和人體的不同之處在於它不分前後,形狀結構可靈活應對災害現場作業。不過,在完成廢墟表面移動這項任務時,它卻花費了較多時間,完全無法與爬行機器人競爭。」
「從整體結果來看,除了在比賽中使用從DARPA租借的人形機器人『ATLAS』那一組外,排名靠前的均為採用了ape型—四腿行走或通過腿上的履帶移動的機器人,即所謂非人形機器人。人形機器人身上許多需要改善的課題清晰地顯現了出來。話雖如此,但看到SCHAFT的表現,我切實感受到日本人形機器人的技術水準還是很高的。不過該公司在2013年11月已被Google併購……」
 SCHAFT公司的機器人駕駛車輛©DARPA
SCHAFT公司的機器人駕駛車輛©DARPA
日美聯合開發機器人的好處
日本與美國已就實施災害應對機器人的聯合研發與實證項目達成了共識。據說雙方也將在日本推動相關開發工作,創造有能力參加DRC的機器人。清水先生表示:「美國已經認識到日本人形機器人的技術高度,希望更多地吸收日本的原創技術。」
如果說吸收日本的機器人技術對美國是好事,那麼對於日本而言的好處又是什麼呢?「像DRC那樣包下整個賽車場,通過完成各種任務的形式舉行聲勢浩大的展示說明並進行基準測試這樣的行動意義重大。之後的機器人開發將實現飛躍式的加速。」
「在經濟產業省的呼籲下,千葉工大也與東京大學、大阪大學、神戶大學組成了聯合團隊,致力於開發雙腿雙手人形機器人以參加2015年6月的DRC。想必我們可以充分運用通過櫻壹號和貳號積累的災害應對經驗。」
美國的併購潮,機器人市場「開花結果」的徵兆
最近幾年,以相繼併購了包括SCHAFT在內的多家機器人創業公司的Google為代表,美國的IT巨頭和有實力的創業公司孵化器一直在加快對機器人技術的投資步伐。清水先生表示,可以說美國如今正掀起一股「機器人熱潮」。
「美國的民間企業似乎都認定了只要再努一點,機器人技術就會『開花結果』。而日本長期以來在國家項目等官方和民間各層面都已經投入了相當大的前期投資。或許正是因為先行了一步,所以在投入了資金卻無法讓機器人實現實用化、商業化的狀況下,人們對進一步積極投資表現出了猶豫不定的態度。」
人們逐漸認識到,即便是在有助於提高生活水準的日常領域,機器人技術也有用武之地。美國企業iRobot於2002年推出的掃地機器人「Roomba」已經成為全球暢銷商品。而在日本國內,東芝和夏普等公司近年來也終於推出了掃地機器人。
 推出具有情感識別功能的機器人「Pepper」的軟體銀行公司社長孫正義(右端)與其子公司法國Aldebaran公司CEO梅佐聶(Bruno Maisonnier)(2014年6月5日,時事通信社)
推出具有情感識別功能的機器人「Pepper」的軟體銀行公司社長孫正義(右端)與其子公司法國Aldebaran公司CEO梅佐聶(Bruno Maisonnier)(2014年6月5日,時事通信社)
清水先生表示,在啟動家用機器人市場這個意義上,孫正義於2012年併購法國Aldebaran Robotics,開發出Pepper的舉動對日本的機器人產業而言也是一股蘊含巨大推動力量的順風。 「日本也有一部分投資者、經營者敏銳地察覺到了機器人技術即將開花結果的轉折點,這就賦予了我們勇氣和決心。」
清水先生認為機器人開發工作的「創造性」在於「新事物的誕生與活動」,他希望開發者再次燃燒起對這種「創造性」的激情。
「針對服務型機器人產業發展停滯的問題,有人認為,首先應該甄別消費者需求,整合當下的技術,創造出有用的產品,不能打開市場的開發行為是難以獲得預算的。這種觀點也沒有錯。但如果僅僅是如此,就不會產生新事物。深入思考自己期待的東西,並使之問世,讓大家都感到期待,這便是最幸福的事情。我再次體會到了自己邁入機器人研發道路之初的那種快樂、那種激情,我覺得支撐這種激情的環境已經形成。」
(nippon.com編輯部根據2014年8月19日採訪內容編輯而成。標題圖片:山田慎二)