日本の「ロボット革命」始動へ
経済・ビジネス 科学 技術・デジタル 社会- English
- 日本語
- 简体字
- 繁體字
- Français
- Español
- العربية
- Русский
「踊り場」にあった日本のロボット産業に、ようやく光が差し始めている。
2014年6月に打ち出された政府の新たな成長戦略の柱のひとつに、「ロボットによる産業革命」が盛り込まれ、年内にもロボット活用具体策の5カ年計画が策定される方針だ。また同月、ソフトバンクが新しい人型(ヒューマノイド)ロボット『Pepper(ペッパー)』を発表した。来年2月に販売開始が予定されるが、19万8千円という「破格」に低い価格設定で業界に驚きを呼んでいる。
ヒューマノイドロボットで先行した日本
 清水正晴氏は1974年生まれ。青山学院大学大学院でロボット研究に携わる富山健教授の研究室に入って以来、ロボットシステムアーキテクチャの研究開発に携わってきた。科学技術振興機構勤務を経て、2003年に千葉工業大学未来ロボット技術研究センター(fuRo)に移籍 (写真:山田愼二)
清水正晴氏は1974年生まれ。青山学院大学大学院でロボット研究に携わる富山健教授の研究室に入って以来、ロボットシステムアーキテクチャの研究開発に携わってきた。科学技術振興機構勤務を経て、2003年に千葉工業大学未来ロボット技術研究センター(fuRo)に移籍 (写真:山田愼二)
「日本はニ足歩行可能なヒューマノイドロボットの研究開発で世界を先導してきました。その背景としては、やはりアニメーションの影響が大きいと思う。ロボットの研究者の中には、『鉄腕アトム』や『ドラえもん』などのアニメの影響を受けている人が多い」と千葉工業大学未来ロボット技術研究センター(fuRo)の清水正晴主席研究員は言う。「ヒューマノイドロボットのシステムアーキテクチャの研究で博士号を取得した私自身は“ガンダム世代”で、多かれ少なかれその影響を受けています」。
日本のヒューマノイドの研究開発では、ホンダの「ASIMO(アシモ)」が重要なランドマークだ。ホンダのロボット開発が始まったのは1986年。当時はロボットが歩くということ自体が珍しく、二足歩行の技術開発は非常に難しいといわれていた。アシモが発表されたのは2000年だが、1990年代半ばにP2、P3などのプロトタイプを提示することで、研究者の間で二足歩行ロボットの開発ブームが起こった。現在、二足歩行の技術はどこまで進化を遂げているのだろうか。
「当初は難しい技術だった二足歩行ですが、最近は走る動きにまで到達して、一定の成果を生んでいます。ただ、それはあくまでも実験レベルとか、デモンストレーションのレベルであり、実環境のフィールドで我々に役に立つサービスを提供するなど、『道具』として役立つという技術レベルには達していません」
ニ足歩行ロボットの技術がもたらす未来
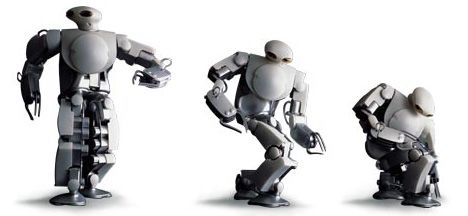 morph3は、科学技術振興機構ERATO北野共生システムプロジェクトと工業デザイナーの山中俊治氏が共同開発したロボットだ。2003年6月1日よりmorph3の研究開発チームが千葉工業大学未来ロボット技術研究センターへ移籍し、継続して研究開発が行われている ©fuRo
morph3は、科学技術振興機構ERATO北野共生システムプロジェクトと工業デザイナーの山中俊治氏が共同開発したロボットだ。2003年6月1日よりmorph3の研究開発チームが千葉工業大学未来ロボット技術研究センターへ移籍し、継続して研究開発が行われている ©fuRo
清水氏が千葉工大で開発に携わったヒューマノイド「morph3(モルフスリー)」(動画)のコンセプトは「メタルアスリート」、つまり関節可動範囲が大きく、運動性能が極めて高い小型軽量ロボットだ。こうした高度の身体性機能を有するデスクトップ型ロボットに関わる技術は、将来、遠隔地間のコミュニケーションにおいて、身体性を持ったインターフェースデバイスの開発に利用できる可能性があるという。
「例えば、遠方の相手と握手する時の力のフィードバックが、お互いの持つ小型の人型ロボットを通じて伝わるというイメージです。視覚と聴覚での伝達は、インターネットを介して携帯やパソコンでできますが、触覚、力を伝えるにはロボット技術が必要になります」
現在千葉工大で開発中のニ足歩行ロボットは、「core(コア)」(動画)という搭乗型だ。ニ足歩行ロボットとしては世界最大級の100キログラムの可搬重量性能がある。清水氏によれば、「階段から山登りまで、足の不自由な方、または歩けても体力がなく、それでも山登りを楽しみたい方が搭乗できる未来の乗り物に向けての基礎研究開発」として位置づけられている。
「ヒューマノイドの研究開発の意義については、よくF1カーが引き合いに出されます。自動車の延長線ですが、あのスペックの車がそのまま公道を走るということではなく、最先端技術を研究開発することによって、その技術の要素が一般に役立つ応用技術に取り入れられるということです」
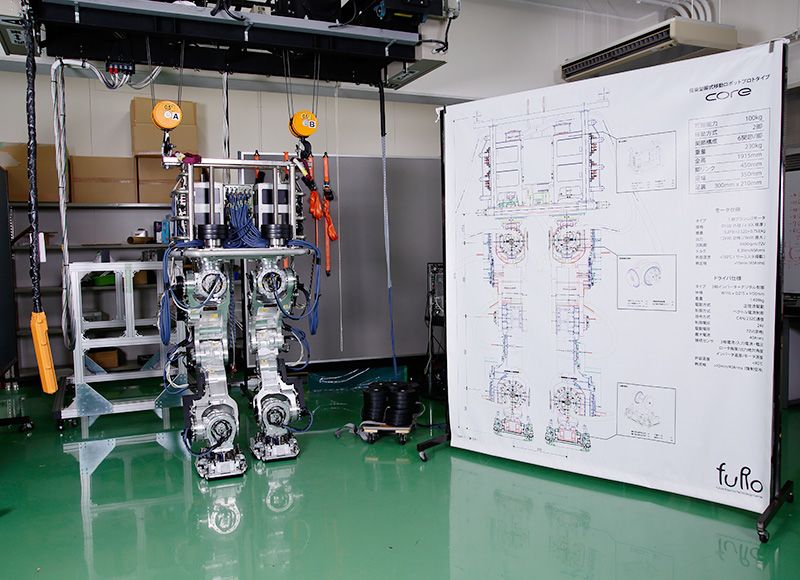 100キロの人や荷物をのせて移動できる未来の二足歩行ロボット「core(コア)」(写真:山田愼二)
100キロの人や荷物をのせて移動できる未来の二足歩行ロボット「core(コア)」(写真:山田愼二)
原発事故で重要度増す災害対応ロボット
汎用性があるヒューマノイドに対して、災害時における特殊ミッション仕様のロボットが災害対応ロボットだ。2011 年3月の東日本大震災における福島原発事故以降、その重要性が強く認識されるようになった。
福島第一原子力発電所に最初に投入された国産ロボットは、千葉工大が開発した「原発対応版Quince(クインス)」だが、原子炉建屋にいち早く入ったのは米国製ロボット「PackBot(パックボット)」だった。
「この時、『日本はロボットの研究開発が進んでいるはずなのに、どうして米国のロボットが先に投入されたのか』『アシモは使えないのか』などという声がちまたにはありました。でも、ヒューマノイドはまだ技術を見せるデモンストレーションやエンターテインメントのレベルだった」と清水氏は振り返る。
「パックボットはもともと軍事偵察用のクローラ型ロボットで、放射能には対応していても、がれきの上の移動や狭く急な階段を上るという性能では、我々が開発していたクインスの方が勝っていました。クインスは1995年神戸の震災後に、がれきの上を踏破して探索するような現場を想定して開発していたロボットです。原発対応ではなかったので、3カ月ほどかけて放射線対策などの改良を行った後に現場に投入され、建屋の5階にまで上って現場の状況をカメラで撮影しました」
「残念ながら、最初に投入されて建屋5階の様子の撮影に初めて成功したクインス1号機は、そのミッション帰途途中の3階で配線が絡まってしまい動作不能になってしまいました。その後、この問題に対処するために改良された2、3号機が投入され、再び5階の調査の後、無事に帰還し、現在も調査活動に投入されています」
千葉工大がクインスの後継機として最初から原発災害に対応するために開発したのが「櫻壱號(さくらいちごう)」、「櫻弐號(さくらにごう)」だ。櫻壱號はクインスよりも大分小さく、より狭い場所にも対応する。櫻弐號は、2メートルほどのアームがオプションになっていて、その先についたカメラで、高い位置や本体が入らない狭い場所にアームを伸ばして見るという用途に開発した。
災害対応ロボット競技で東大発ベンチャー企業が優勝
このように、日本では「3・11」を通じて明確になった課題を踏まえて災害対応ロボットの改良が進むが、米国では汎用性の高い人型ロボットを災害対応に活用するための研究開発に力を入れ出した。2013年末に米国防高等研究計画局(DARPA)が主催したロボット競技会「DARPAロボティクス・チャレンジ(DRC)」では、原発事故を想定した災害時に緊急対応できるロボット開発の推進を目的としていた。8つのタスクをこなすことが求められるが、そこには車の運転などが含まれ、明らかに人型に近いロボットを想定している。清水氏はこのDRCを米国で視察する機会を得た。
「優勝したのは、東京大学発のベンチャー企業『SCHAFT(シャフト)』です。このロボットは二脚二腕ですが、人体とは違って前後ろがなく、災害現場での作業に柔軟に対応できる造りになっています。ただ、タスクの1つでもあったがれき上の踏破は、現状ではクローラ型のロボットとは比較にならないほど時間がかかる」
「全体の結果からみても、DARPAから貸し出されている人型ロボット『ATLAS(アトラス)』を利用したチームを除くと、エイプ型―4足歩行や足についたクローラで移動する―ロボットなど、いわゆる人型ロボットではない機体を採用したチームが上位を占めました。人型ロボットは改善すべき多くの課題が明確になりました。それでもシャフトの活躍を見ると、日本のヒューマノイドの技術はレベルが高いことを実感しました。ただし同社は、2013年11月グーグルに買収されていますが…」
 車を運転するシャフト社のロボット ©DARPA
車を運転するシャフト社のロボット ©DARPA
日米ロボット共同開発のメリット
日本と米国は、災害対応ロボットの共同研究開発と実証プロジェクトに関して合意している。日本でも、DRCにも参加できるようなロボットを開発する取り組みを促進するということだ。「米国は日本のヒューマノイド技術のレベルの高さを認識しており、日本発の技術を多く取り込みたいのだと思う」と清水氏は言う。
米国にとってのメリットが日本のロボット技術の取り込みだとすれば、日本にとってのメリットは何なのか。「DRCのようにカーレース場を丸ごと借りきって、さまざまなタスクをこなすような大規模なプレゼンテーションを行い、ベンチマークテストができるということの意義が大きい。その後のロボット開発が飛躍的に加速します」。
「経済産業省の呼びかけで、千葉工大も東京大学、大阪大学、神戸大学との共同チームで、2015年6月のDRC参加に向けた二脚二腕の人型ロボットの開発を進めています。櫻壱號、弐號で培った災害対応のためのノウハウを十分に活かせていけると思う」
米国の買収ブーム、ロボット市場「開花」の兆候
この数年、シャフトを含めたロボットベンチャーを次々に買収したグーグルを筆頭に、米国のIT大手や有力ベンチャーキャピタルがロボット技術への投資を加速させている。まさに米国は今、「ロボットブーム」だと清水氏は言う。
「米国の民間企業は、ロボット技術はもう一押しすれば、『花開く』と判断しているのではないでしょうか。一方日本では、これまで国家プロジェクトをはじめ官民においてかなりの先行投資をしてきました。先行しているが故に、これまでの投資にもかかわらずロボットが実用化、事業化しない状況の中で、さらなる積極的な投資を逡巡(しゅんじゅん)している状態が続きました」
日常生活に役立つ身近な分野でも、ロボット技術が役に立つ市場があるということも徐々に認知はされてきている。米国企業のiRobotが2002年に発売したお掃除ロボット「ルンバ」は世界的なヒット商品になった。日本でも、最近になってようやく、東芝やシャープなどのメーカーが掃除ロボットを発売した。
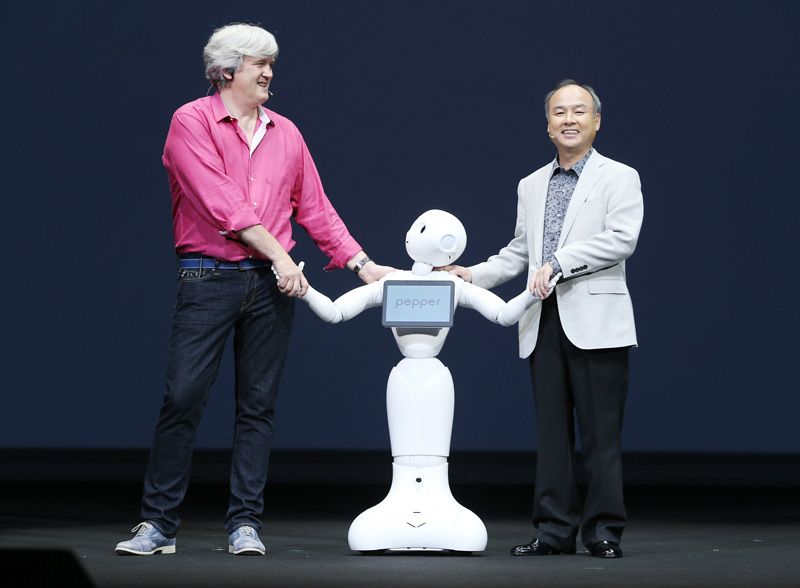 感情認識機能を搭載したロボット「Pepper(ペッパー)」を発表するソフトバンクの孫正義社長(右端)と子会社の仏アルデバラン社のブルーノ・メゾニエCEO(2014年6月5日/時事)
感情認識機能を搭載したロボット「Pepper(ペッパー)」を発表するソフトバンクの孫正義社長(右端)と子会社の仏アルデバラン社のブルーノ・メゾニエCEO(2014年6月5日/時事)
もちろん、2012年に仏アルデバラン・ロボティクスを買収してペッパーを開発した孫正義氏の動きは、家庭用ロボット市場を活性化する意味でも、日本のロボット産業にとって大きな追い風だと清水氏は言う。「日本の投資家、経営者にもこのロボット技術開花の分岐点を敏感に感じ取っている人がいると勇気づけられています」。
清水氏自身は、「新しい存在が生まれて動き出す」というロボット開発の“創造性”に対するワクワク感をあらためて大事にしたいと思っている。
「サービスロボット産業の停滞に関し、まずは消費者のニーズを拾い上げて今現在の技術を統合して役に立つ製品を生み出し、市場を立ち上げないことには開発の予算がつかないという見方があります。それも間違いではありません。ただ、それだけでは新しいものは生まれない。自分がワクワクするものを突き詰めて世に問い、それがみんなをワクワクさせることができれば最高だと思う。私自身がロボット研究開発の道に入った頃の楽しさ、ワクワク感をあらためて思いだし、そのワクワク感を後押ししてくれる環境がようやく整ったという気がしています」
(2014年8月19日インタビュー)
聞き手・文 板倉君枝 (編集部)/ タイトル写真撮影:山田愼二▼あわせて読みたい
 なぜ、日本の研究者は人型ロボットを作るのか なぜ、日本の研究者は人型ロボットを作るのか 日本のロボットは世界トップクラスの水準を誇る。中でも「人型ロボット」は、日本が大きくリードする開発分野だ。第一人者・早稲田大学の高西淳夫教授に、人型ロボットの進化と今後の可能性について語ってもらった。 |  福島原発建屋で活躍する「Quince(クインス)」 福島原発建屋で活躍する「Quince(クインス)」原発建屋内に国産ロボットとして初めて投入された災害対応ロボット「Quince(クインス)」。高放射線量の環境下で人間に代わって作業できるように改良した結果、大きな成果を挙げている。 |  みんなが知ってる“あのロボット”ギャラリー みんなが知ってる“あのロボット”ギャラリー人型ロボットについて、企業も負けず劣らず熱心に研究・開発を続けている。人を助ける「道具」から、人から愛される「仲間」へ。学術機関や企業の “顔”としても活躍している人気ロボットたちを紹介する。 |